Насосные станции и установки
Принцип работы любой насосной станции довольно прост и состоит в том, что насос закачивает воду в накопительный бак, и вода пополняется по мере израсходования. Датчик уровня, следящий за уровнем воды в баке, включает и отключает насос.
Насосная станция водоснабжения это моноблок, в котором насос соединен с гидроаккумулятором через реле, которое автоматически при падении давления поступающей воды до определенной критической величины включает насос для повтора цикла. Насосные станции необходимы при подаче воды из глубинных скважин либо каких-то других автономных источников. Их можно также применять для перекачивания воды из водопроводной сети с недостаточным напором и для заполнения накопительных емкостей про запас. Система не нуждается в погружении и монтируется на поверхности, не требуя при этом какого-то специального контроля за безопасностью, так как все процессы, включая устранение гидроудара, выполняются или автоматически, или полуавтоматически.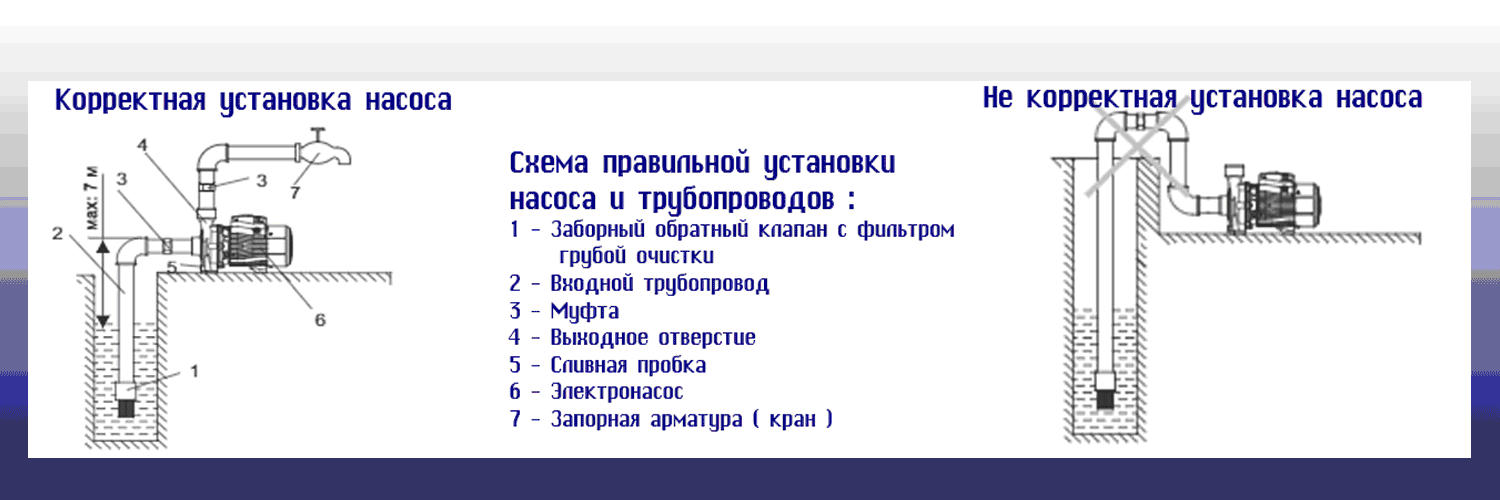

Насосная станция в качестве комплекса гидротехнических средств и оборудования способна выполнить работы, связанные с водозабором из источников орошения или осушения, с подъемом и транспортированием воды к месту потребления или транспортировкой воды в сборный бак.
Насосные станции (НС) можно классифицировать по разным признакам, как:
- область применения и назначение,
- уровень подачи, что означает расположение относительно источника воды (это станции береговые, русловые, стационарного и передвижного типа),
- оросительные станции, поднимающие воду к оросительным каналам;
- осушительно-оросительные системы насосных станций, осушительно-увлажнительные системы,
- осушительные станции, отводящие воду с мелиорированных участков;
- подкачечные, служащие для подвода воды к закрытым оросительным системам.

У насосных станций может быть разный уровень подачи, независимо от области применения и напора: малый уровень подачи – до 1 м³/с; средняя подача – 1 — 10 м³/с, высокая подача – 10 — 100 м³/с и уникальные станции с подачей, превышающей 100 м³/с.
По источнику энергии насосные станции классифицируют на электрифицированные и тепловые станции. Последние работают от привода двигателя внутреннего сгорания. Насосные станции могут иметь сезонный режим работы и работать круглогодично. Различают насосные станции, забирающие воду из поверхностных источников воды, и из-под земли. Стационарные насосные станции устанавливаются в помещениях или здании, которое служит для расположения основного и вспомогательного гидромеханического, электротехнического и механического оборудования, трубопроводной арматуры и т.д. По конструктивным особенностям их классифицируют на наземные, камерные и блочные насосные станции. По характеру управления стационарные насосные станции могут управляться вручную и автоматически.
Передвижные насосные станции по сравнению со стационарными насосными станциями более мобильны, маневренны, их цена на 20 — 25% дешевле. Их используют для подачи воды в оросительную систему открытого или закрытого типа, в дождевальные устройства и для систем водоснабжения. Передвижные насосные станции достаточно подвижны, что делает возможным их применение на разных участках орошения в течение всего поливного сезона. Их целесообразное использование при поливе пойменных участков, при значительных колебаниях уровня воды в источнике не требует сооружения дорогостоящих водозаборных устройств, а глубина водоисточника в месте забора воды не должна быть < 0,6 — 0,8 метров. Если глубина окажется меньше, то следует применять устройство самого простого подпорного сооружения или приямка. Выбирая место для установки передвижной насосной станции, следует смотреть на подход к воде и площадку для насосной станции, которая должна обеспечивать высоту всасывания макс.
ПНС с приводом от собственного двигателя классифицируются по производительности: 25 — 750 литров / секунду, по напору: 5 — 100 метров, по конструкции ходовой части: на полозьях или колёсах.
Насосные станции сооружаются, как правило, за короткий период времени с применением высоких технологий, совершенного унифицированного оборудования и новейших методов выполнения строительства. Насосные станции или установки включают машинное помещение с насосами, водозаборные системы, водоприёмники, камеры переключений, ёмкости с водой. Любая насосная установка не может обойтись без электрического хозяйства и трансформаторной подстанции, которые могут находиться в одном помещении с машинным залом. Некоторое из выше перечисленного оборудования может отсутствовать или объединяться с функциональной точки зрения. Например, машинный зал насосной станции может составлять одну строительную конструкцию с водоприёмником, что является типичным для насосных станций I подъёма. У насосных станций водоотведения машинный зал может быть совмещён с приемным резервуаром. Насосное оборудование насосной установки может различаться в зависимости от её назначения, бывают установки с горизонтально и вертикально расположенными насосами, с насосами осевыми и центробежными, которые могут быть установлены с положительной высотой всасывания или с подпором, то есть под залив.
Насосные станции или установки включают машинное помещение с насосами, водозаборные системы, водоприёмники, камеры переключений, ёмкости с водой. Любая насосная установка не может обойтись без электрического хозяйства и трансформаторной подстанции, которые могут находиться в одном помещении с машинным залом. Некоторое из выше перечисленного оборудования может отсутствовать или объединяться с функциональной точки зрения. Например, машинный зал насосной станции может составлять одну строительную конструкцию с водоприёмником, что является типичным для насосных станций I подъёма. У насосных станций водоотведения машинный зал может быть совмещён с приемным резервуаром. Насосное оборудование насосной установки может различаться в зависимости от её назначения, бывают установки с горизонтально и вертикально расположенными насосами, с насосами осевыми и центробежными, которые могут быть установлены с положительной высотой всасывания или с подпором, то есть под залив.
Расположение машинного зала относительно поверхности земли характеризует насосные станции как станции:
- наземного типа;
- полузаглубленные станции;
- заглубленного и
- подземного типа.
Для наземных насосных станций характерно расположение пола машинного помещения на уровне отметок окружающей земли, может быть предусмотрен въезд автотранспорта.
Для полузаглубленных насосных станций пол заглубляется по сравнению с уровнем земли, у них отсутствует перекрытие между машинным помещением и первым этажом, присутствие которого является характерным для насосных станций заглубленного типа. Если станция достаточно сильно заглубляется, то могут иметь место дополнительные подземные этажи для расположения вспомогательного оборудования. Эти насосные станции носят название насосных станций шахтного типа.
Для подземных насосных станций характерно их полное расположение под землей, компактная конструкция и автоматическое управление. Они могут быть прямоугольной (легче осуществлять монтаж унифицированных компонентов оборудования), круглой формы, иметь вид эллипса (легче воспринимают давление гидростатики) или сложную форму. По типу управления насосные станции подразделяются на: — станции, оснащённые ручным управлением, когда обслуживающий персонал в лице операторов управляет операциями станции; — с автоматической системой управления, когда все операции выполняются автоматически, регулирование осуществляется по уровню воды в баке или давлению воды в линии и т.
Если продолжать далее разговор о видах насосных станций, можно их подразделить также на следующие подвиды:
- водопроводные,
- канализационные.
К канализационным насосным станциям (КНС) относятся конструкции, которые обеспечивают удаление сточных вод: ливневых, фекальных, промышленных. Они имеют следующие преимущества:
Они имеют следующие преимущества:
- довольно длительный срок эксплуатации; часто это объясняется использованием на комплектующих деталях стеклопластика, который не ржавеет и не гниёт;
- безопасный режим работы вследствие наличия датчиков давления и уровня жидкости, которые контролируют функционирование системы;
- компактное исполнение;
- возможность обеспечения полностью автоматического режима работы системы;
- экологически чистый подход при эксплуатации: нет неприятного запаха и бесконтрольного выброса сточных вод.
Канализационная насосная установка размещается в корпусе и включает в себя насосы (основные и вспомогательные), датчики, трубопровод, соединительные патрубки. Основная отличительная особенность канализационной насосной станции заключается в наличии специального контейнера для попадания содержащихся в сточных водах крупных частиц. Контейнер периодически извлекается и опорожняется, затем чистится. Канализационные насосные установки могут функционировать почти в любых атмосферных условиях, что является также их плюсовым моментом.
Канализационные насосные установки могут функционировать почти в любых атмосферных условиях, что является также их плюсовым моментом.
В современной автономной водопроводной системе важнейшим компонентом является сегодня насосная установка, которая или приобретается в готовом виде, или собирается самим пользователем, если речь идёт о компактной установке для частного дома. Чтобы не иметь проблем с эксплуатацией насосной установки, следует хорошо понимать принцип её работы. Для правильного подбора насосной станции для своих конкретных нужд, следует иметь в виду 2 фактора: технические параметры насосной станции и нюансы имеющейся скважины. Среди технических параметров, как всегда, речь ведут, в первую очередь, о производительности. Это значит, что станция должна поднимать на высоту такой объём воды, который обеспечит все необходимые для дома и придворных построек нужды. Для характеристик скважины важную роль играют производительность, её глубина, статистический уровень воды (если насос вне работы), динамический уровень воды (если насос в работе), тип фильтра и Ø трубы.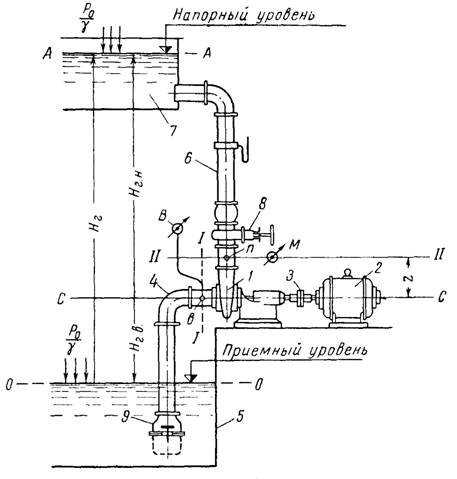 Стандартные насосные станции поднимают воду эффективно с глубины скважины макс. 9 м. Они могут быть оснащены или самовсасывающим центробежным насосом, или самовсасывающим вихревым насосом. Относительно мощности станции можно сделать следующий вывод, который нам подсказывает практика: для дома, где проживает семья из четырёх человек, достаточно будет приобрести насосную станцию малой или средней мощности, 2-4 м³/ час, и с напором 45-55 метров.
Стандартные насосные станции поднимают воду эффективно с глубины скважины макс. 9 м. Они могут быть оснащены или самовсасывающим центробежным насосом, или самовсасывающим вихревым насосом. Относительно мощности станции можно сделать следующий вывод, который нам подсказывает практика: для дома, где проживает семья из четырёх человек, достаточно будет приобрести насосную станцию малой или средней мощности, 2-4 м³/ час, и с напором 45-55 метров.
Насосные станции с накопительным баком считаются уже устаревшими, но такие станции еще встречаются. Накопительный бак очень громоздкий, уровень воды в нем и напор контролирует поплавок, данные выводятся на датчик, который, срабатывая, дает сигнал на подкачку воды. Это всегда была популярная система водоснабжения, однако недостатков у этой системы было множество:
- всегда низкий напор, так как вода поступает в бак самотеком;
- большие размеры бака;
- сложная установка бака, ибо он должен размещаться выше уровня самой станции;
- при выходе из строя датчика переполнения вода начинает переливаться в помещение.
Современные насосные станции снабжаются гидроаккумулятором. Суть состоит в том, что на станции устанавливается реле давления. Станции, оснащённые гидроаккумулятором, считаются станциями прогрессивными и имеют гораздо меньше недостатков. Реле контролирует верхнюю границу давления окружающего воздуха, который сжимается в гидроаккумуляторе под давлением воды. После установки необходимого давления насос отключается, и включается снова только при поступлении сигнала от реле о нижней границе давления.
Итак, все равно, какая насосная станция, с накопительным баком или гидроаккумулятором, она укомплектовывается насосным агрегатом, мембранным баком под напором, реле давления, манометром, кабелем и разъемами для подключения. Различают насосные станции также по типу рабочего насоса, который может быть с эжектором и без эжектора. Если эжектор встроенный, то вода поднимается за счет созданного разряжения. У этих насосных станций довольно высокая стоимость, однако она вполне оправданная, они могут подавать воду с глубины 20-45 метров. Оборудование этих станций высокопроизводительное, довольно компактное, но работает очень шумно, и в связи с этим его лучше размещать в подсобных помещениях.
Оборудование этих станций высокопроизводительное, довольно компактное, но работает очень шумно, и в связи с этим его лучше размещать в подсобных помещениях.
Имеются также насосы для насосных станций с выносным эжектором, который погружают вместе с двумя трубами в скважину или колодец. Вода поступает в эжектор по одной трубе, образуя всасывающую струю. В системе не должно быть воздуха и песка, КПД этих насосов намного ниже, чем у стандартных насосных станций. Такая станция может быть установлена дома, она работает бесшумно.
На самом же деле насосов, из которых комплектуют насосные станции, существует огромное количество.
В последние годы заметно улучшилось производство в нашей стране пожарных автомобилей, эффективность работы которых определяет, как правило, качественный показатель насосной установки, которая является, как бы, не самым главным элементом пожарной машины. Насосные установки, используемые в технике пожаротушения, представляют собой совокупность инженерных коммуникативных систем, способных обеспечить безопасность людей в здании в момент начавшегося пожара. Основной целью подобных конструкций является ликвидация распространяющегося возгорания, качественное тушение пожара и быстрое удаление дыма и углекислого газа из здания.
Основной целью подобных конструкций является ликвидация распространяющегося возгорания, качественное тушение пожара и быстрое удаление дыма и углекислого газа из здания.
Раньше пожарные машины оснащались обычным пожарным насосом. Пожары бывают разные, и, соответственно, их тушение также обладает рядом отличительных особенностей, что обусловлено различными требованиями к работе насосных установок. Чтобы ликвидировать пожар на верхних этажах, нужна насосная установка с высоким давлением. А для ликвидации крупных лесных пожаров нужна пожарная машина с высокопроизводительной насосной установкой (70 — 100 л/с). И будет достаточно одной машины, а не двух по 40 литров в секунду каждая.
В конструкциях последних моделей пожарных насосных установок, изготавливаемых мировыми лидерами в данной области, следует отметить оснащение их новыми системами контроля и дистанционного управления, регулирование давления в автоматическом режиме, автоматика водозаполнения и дозировки пенообразующего вещества, вывод данных на жидкокристаллический экран. Однако такую технику тяжело эксплуатировать в наших условиях, когда речь идёт о пожарах глобального уровня, например, в условиях сибирского климата. Какой жидкокристаллический экран насосной установки выживет после пожара в таких условиях?
Однако такую технику тяжело эксплуатировать в наших условиях, когда речь идёт о пожарах глобального уровня, например, в условиях сибирского климата. Какой жидкокристаллический экран насосной установки выживет после пожара в таких условиях?
Одним из важных элементов насосной установки пожарной машины считается вакуумная система водозаполнения, работающая от открытого водоема. Вакуумный способ водозаполнения может быть ручным и автоматическим, в качестве вакуумного насоса установки могут работать поршневые, мембранные, шиберные, водокольцевые, газоструйные насосы и др. Каждая из этих систем в оснащении насосной станции для пожарных автомобилей подходит для определенных условий работы.
Работа вакуумной системы водозаполнения, в частности, уровень и скорость вакуумирования, непосредственно связана с функцией привода двигателя, или скорости оборотов данного двигателя. Это связано с определенными неудобствами в техническом обслуживании пожарной техники, необходима ежедневная проверка на «сухой вакуум». Насосы вакуумной насосной станции представляют собой автономную вакуумную систему и были разработаны недавно по заказу МЧС России. Они снабжены автономным электроприводом, получающим питание от аккумулятора пожарной машины. Электрические сигналы, управляя насосами, автоматизируют почти все процессы, входящие в операции по пожаротушению, и являются на сегодня самыми перспективными в вопросе водозаполнения. Это уже отметили все известные производители пожарных машин в России.
Насосы вакуумной насосной станции представляют собой автономную вакуумную систему и были разработаны недавно по заказу МЧС России. Они снабжены автономным электроприводом, получающим питание от аккумулятора пожарной машины. Электрические сигналы, управляя насосами, автоматизируют почти все процессы, входящие в операции по пожаротушению, и являются на сегодня самыми перспективными в вопросе водозаполнения. Это уже отметили все известные производители пожарных машин в России.
Собираем насосную станцию самостоятельно. | САН САМЫЧ
Здравствуйте, уважаемые читатели «Сан Самыча». Сегодня мне бы хотелось рассказать вам о том, как возможно собрать насосную станцию, и в каких случаях оправдана сборка насосной станции из разрозненных частей, которые можно купить в магазине.
Почему собирают насосную станцию сами.Прежде всего, как мне кажется, насосную станцию стоит собирать самостоятельно, если у вас уже есть какие-то из её составных частей, обычно наиболее дорогих.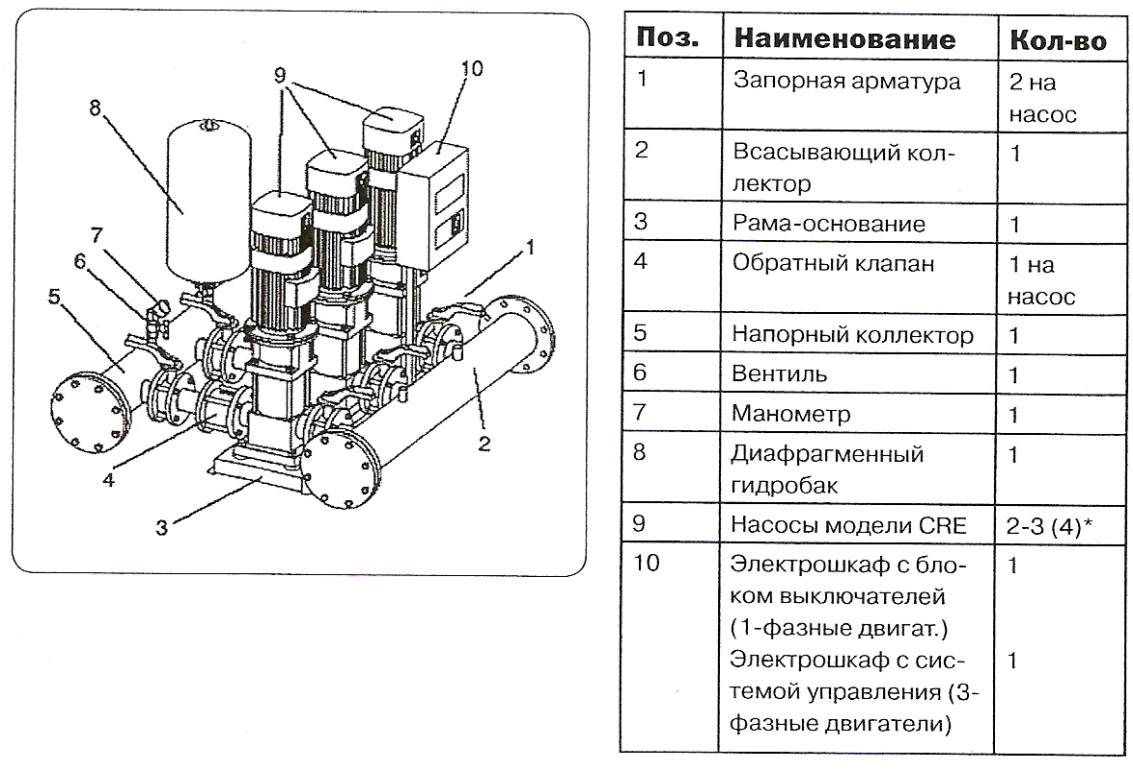 Это – насос и гидроаккумулятор. Потому что стоимость насоса – это, примерно, половина стоимости насосной станции, соответственно, гидроаккумулятор – примерно треть. То есть, не имеет смысла покупать новую насосную станцию, если у вас раздавило зимой гидроаккумулятор или сгорел по какой-то причине насос. Можно купить отдельно и то, и другое, и просто заменить то, что у вас сломалось, благо крепежи насоса и крепежная площадка гидроаккумулятора, как правило, стандартные и соединить одно с другим можно без особого труда.
Это – насос и гидроаккумулятор. Потому что стоимость насоса – это, примерно, половина стоимости насосной станции, соответственно, гидроаккумулятор – примерно треть. То есть, не имеет смысла покупать новую насосную станцию, если у вас раздавило зимой гидроаккумулятор или сгорел по какой-то причине насос. Можно купить отдельно и то, и другое, и просто заменить то, что у вас сломалось, благо крепежи насоса и крепежная площадка гидроаккумулятора, как правило, стандартные и соединить одно с другим можно без особого труда.
Другой причиной собирать насосную станцию самостоятельно, может послужить несоответствие ваших требований и характеристик оборудования готовой насосной станции. Например, вам нужен насос с большим напором или расходом воды, чем у предлагаемых вам насосных станций, а то, что устраивает вас по характеристикам, не устраивает – по стоимости или по надежности. Или габариты насосной станции слишком велики для места, куда вы собираетесь её поставить, или вас не устраивает емкость гидроаккумулятора, ну и т.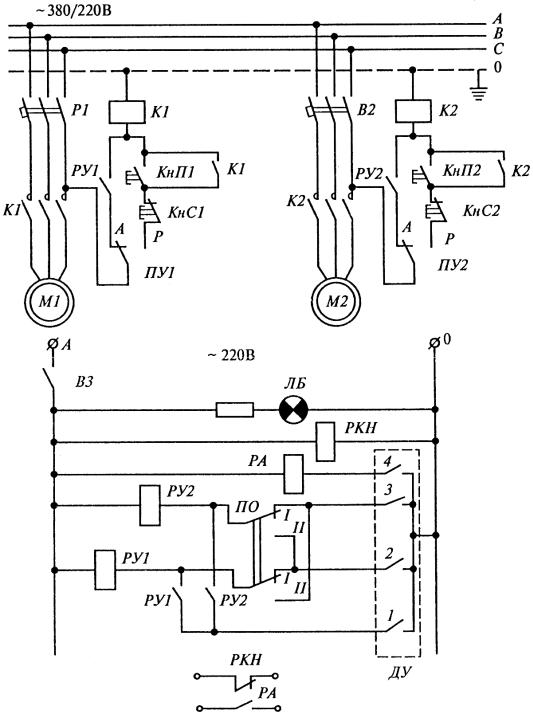 д. Только нужно иметь в виду, что итоговая стоимость насосной станции вполне может быть намного больше той, что вы планировали.
д. Только нужно иметь в виду, что итоговая стоимость насосной станции вполне может быть намного больше той, что вы планировали.
Третий, наиболее распространенный вариант, когда вы вынуждены собирать распределенную насосную станцию из-за очень глубокого залегания воды или приличной удаленности от дома источника воды. Как правило, в этом случае используют мощный погружной насос, а гидроаккумулятор с блоком автоматики ставят где-нибудь дома.
Так ли нужен гидроаккумулятор? Резонный вопрос: можно ли обойтись без гидроаккумулятора? В принципе, это возможно, но с обычным блоком автоматики насос будет включаться и выключаться очень часто, реагируя даже на незначительный расход воды. Ведь количество воды в напорном трубопроводе невелико, и малейший расход воды приведет к быстрому падению давления и такому же быстрому нарастанию его при включении насоса. Именно из-за того, чтобы насос не включался по каждому вашему «чиху», ставят гидроаккумулятор, хотя бы небольшой. Так как вода – вещество не сжимаемое, в гидроаккумулятор накачивают воздух, который, в отличие от воды, хорошо сжимается и выступает своеобразным демпфером, регулирующим накопление и расход воды. Если воздуха в гидроаккумуляторе нет или слишком мало, то и сжиматься будет нечему, то есть не будет накопления воды.
Так как вода – вещество не сжимаемое, в гидроаккумулятор накачивают воздух, который, в отличие от воды, хорошо сжимается и выступает своеобразным демпфером, регулирующим накопление и расход воды. Если воздуха в гидроаккумуляторе нет или слишком мало, то и сжиматься будет нечему, то есть не будет накопления воды.
В идеале, емкость гидроаккумуляторов должна быть лишь немного меньше дебета вашего источника воды, и насос, в этом случае, будет включаться лишь при израсходовании какого-то, довольно приличного запаса воды, т.е. очень редко, но надолго. Но тогда это будет очень дорогая по стоимости накопительная схема.
Сейчас в продаже появились насосные станции с улучшенными блоками автоматики со встроенной защитой от сухого хода, которые плавно запускают и останавливают насос, регулируют его мощность в зависимости от заданного давления. Считается, что гидроаккумулятор, в принципе, им не нужен. Но все это хорошо работает только при отсутствии перепадов напряжения, чем наша глубинка и дачные поселки похвастать не могут. И, к сожалению, стабилизаторы не всегда спасают от этой беды. К тому же цена такой станции очень часто намного выше обычной, что, как мне кажется, себя не оправдывает.
И, к сожалению, стабилизаторы не всегда спасают от этой беды. К тому же цена такой станции очень часто намного выше обычной, что, как мне кажется, себя не оправдывает.
Вистан.
Из всех готовых систем автоматики для насосных станций особенно выделяется наша отечественная разработка Вистан, предназначенная исключительно для организации насосной станции на базе вибрационного насоса. Я не сторонник применения вибрационных насосов в системах водоснабжения частных и дачных хозяйств, но не могу не уделить внимание этому устройству из-за большой популярности «Малышей», «Ручейков» и т.д. на постсоветском пространстве.
Вистан и схема его подключения.
В интернете очень много лестных отзывов об этом устройстве. В жизни, к сожалению, не все так радужно. Итак, вкратце.
Достоинства:
— Специальная разработка для вибрационных насосов;
— Автоматически поддерживает давление в системе на уровне 1,5-2,0 бар;
— Имеет встроенную защиту от сухого хода;
— Имеет встроенный стабилизатор напряжения, может работать с напряжением от 160 до 250 Вольт;
— Может работать без гидроаккумулятора, плавно изменяет мощность насоса;
— Плавный пуск и останов насоса;
— Имеет защиту по превышению электрического тока: плавкий предохранитель на 5 Ампер;
— Автоматически возобновляет работу при восстановлении параметров: напряжение в сети, появление давления воды на напоре насоса (сухой ход).
— Простота монтажа и демонтажа схемы: производитель рекомендует использовать гибкую подводку на ½ дюйма.
Недостатки:
— Насос должен создавать давление на входе в устройство не меньше 3,0 бар: не всякий вибрационный насос способен на это, учитывая разницу по высоте между зеркалом воды в колодце (скважине) и местом расположения Вистана.
— Расход воды ограничен внутренним сечением гибкой подводки, или нужно ставить гидроаккумулятор.
— Защита по сухому ходу решена своеобразно: устройство отключает насос, если давление на входе не поднимается выше 0,8 бар за 10 секунд. Т.е. вода на самом деле есть, и насос исправно её качает, просто ему не хватает сил поднять давление до необходимого.
— Нет возможности регулировать давление в системе.
— Высокая цена устройства по сравнению со стоимостью вибрационных насосов. Стоимость набора «Вистан + насос» сопоставима по стоимости готовой насосной станции не самого плохого качества (а китайские, раза в полтора дешевле).
В целом, этот вариант организации насосной станции подойдет дачникам, привыкшим к своим вибрационным насосам и не избалованным благами цивилизации на даче. К тому же, систему легко собрать весной перед использованием и разобрать осенью, забрав все хозяйство с собой в город и не боясь, что её украдут или разорвет морозами. Для более серьезной системы водоснабжения дома это устройство, впрочем, как и использование вибрационного насоса, вряд ли подойдет.
Блок автоматики для центробежных насосов.
Для организации насосной станции на основе центробежного насоса, неважно погружного или поверхностного, необходим блок автоматики. Самое простое – это собрать его самому, используя покупные элементы: коллектор, реле давления, манометр. Но можно купить и готовый блок, на котором все это уже будет установлено. Останется только лишь установить его на напоре насоса в удобном для обслуживания месте.
Различные фирмы предлагают большое разнообразие таких блоков, отличающиеся по комплектации и стоимости. Самые простые и недорогие, включают в себя только необходимые элементы, названные выше. Чуть подороже будут стоить блоки, в которые добавлен датчик сухого хода. Самыми же навороченными считаются блоки автоматики, которые самостоятельно, регулируя мощность насоса, поддерживают заданное давление в системе, а также имеют несколько (до трех) защит от разных неприятных вещей (сухой ход, перегрузка насоса, разрыв напорного трубопровода).
Самые простые и недорогие, включают в себя только необходимые элементы, названные выше. Чуть подороже будут стоить блоки, в которые добавлен датчик сухого хода. Самыми же навороченными считаются блоки автоматики, которые самостоятельно, регулируя мощность насоса, поддерживают заданное давление в системе, а также имеют несколько (до трех) защит от разных неприятных вещей (сухой ход, перегрузка насоса, разрыв напорного трубопровода).
Коллектор.
Собственно, каждый волен делать свой выбор. Кому-то проще собрать такой блок самому, кому-то проще его купить. Как мне кажется, единственный недостаток таких блоков, кроме цены, это как раз их блочность. Т.е. если что- то сломается в составе такого блока автоматики, то менять придется весь блок, а это иногда бывает накладно.
Схемы насосных станций.
Самая распространенная схема насосной станции это когда все её элементы собраны вместе, как написал один из читателей: «насос на бочонке».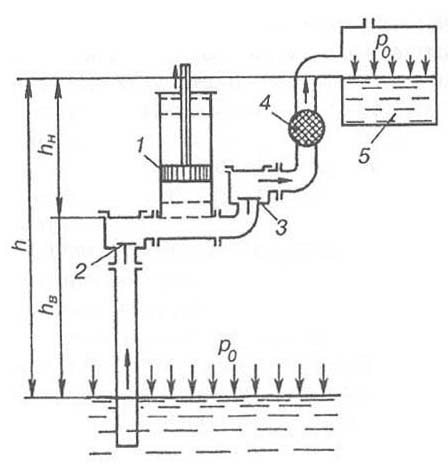 В этом случае блок автоматики ставится на напоре насоса, а к гидроаккумулятору вода отводится по отдельной трубе или гибкой подводке. Получается, что можно поставить в разных местах насос и гидроаккумулятор (ГА), просто заменив отвод к ГА на более длинный.
В этом случае блок автоматики ставится на напоре насоса, а к гидроаккумулятору вода отводится по отдельной трубе или гибкой подводке. Получается, что можно поставить в разных местах насос и гидроаккумулятор (ГА), просто заменив отвод к ГА на более длинный.
Но лучшим вариантом будет поставить блок автоматики на ГА, соединив коллектор блока с насосом трубой. Тогда мы получаем распределенную насосную станцию, где насос может стоять, например, в колодце (или в скважине для погружного насоса), а ГА находится в теплом доме.
Продолжая усовершенствовать нашу схему, можно найти наиболее удобное место для блока автоматики. Мне таким местом представляется распределительный коллектор холодной воды, где блок автоматики будет поддерживать постоянное давление (ведь именно это нам и нужно). Гидроаккумулятор, в этом случае, можно поставить под ванну или в любое другое свободное место ванной комнаты, а от насоса будет подходить напорный трубопровод. Сам же насос можно поставить поближе к источнику водоснабжения и подальше от дома, чтобы не слышать его шум, или купить погружной насос (опять же никакого шума в доме).
Таким образом, разместив элементы насосной станции в тех местах, где это удобно и не бросается в глаза, вы получите максимальный комфорт при эксплуатации водоснабжения дома: «как в квартире». Главное не забыть, что и куда вы запихнули.
Исследование работы схемы управления безбашенной насосной установки
Работа добавлена: 2016-06-23ЛАБОРАТОРНАЯ РАБОТА № 1
по дисциплине «Автоматизация технологических процессов»
Специальность 2-74 06 31-01 «Энергетическое обеспечение сельскохозяйственного производства»
Тема лабораторной работы:Исследование работы схемы управления безбашенной насосной установки
Цель лабораторной работы:Научится монтажу и наладке схем управления насосными установками работающими по параметру уровня
Время выполнения:2 часа.
Место выполнения работы:лаборатория «Автоматизация технологических процессов»
Дидактическое и техническое обеспечение:схемы, лабораторный стенд, мультиметр
Список литературыдля самостоятельной подготовки лабораторной работы:
Автоматизация технологических процессов. С.Н. Фурсенко — Минск: БГАТУ,2011г.
Автоматизация сельскохозяйственной техники. Г.Е. Радченко Мн: УП “Технопринт” 2005г.
Автоматизация производственных процессов на животноводческих фермах и комплексах. И.Ф. Кудрявцев, О.Б. Карасев М: Агропромиздат 1985г.
Автоматизация технологических процессов. И.Ф. Бородин, Н.М. Недилько М. Агропромиздат 1980г.
Автоматизация технологических процессов и системы автоматического управления. И.Ф. Бородин, С.А. Андреев М.Колос 2005г.
Автоматизация технологических процессов. И.Ф. Бородин, Ю.А. Судник М: Колос 2005г.
И.Ф. Бородин, Ю.А. Судник М: Колос 2005г.
Техника безопасности и пожарная безопасность на рабочем месте:
— инструкция по охране труда при проведении лабораторно-практических занятий по дисциплине «Автоматизация технологических процессов» №3,
— инструкция по правилам пожарной безопасности №1.
Последовательность выполнения работы:
1. Внеурочная подготовка
1.1.Самостоятельно подготовиться к лабораторной работе.
1.2. Подготовить титульный лист отчета и разделы основной части, включающие задачи, теоретическое обоснование, обозначение и термины, средства обеспечения и материалы.
1.3. Изучить инструкции по технике безопасности и противопожарной безопасности при выполнении работы.
2. Работа в лаборатории
2.1. Пройти контроль по подготовке к лабораторной работе
2.2. Подготовить рабочее место к выполнению работы.
2.3. Изучить методические указания к выполнению лабораторной работы
2.4. Выполнить лабораторную работу
2.5. Убрать рабочее место, оформить и сдать отчет.
Задание и методические рекомендации по их выполнению:
Задание 1. Изучить устройство принцип работы датчика реле давления, способ его настройки.
Ящики управления предназначены для автоматического управления водоподъемными установками с одним насосным агрегатом.
Ящики управления водоподъемными установками с пневмогидроаккумуляторами используется в комплекте водоснабжения животноводческих ферм и других сельскохозяйственных потребителей при заборе воды из скважин, шахтных колодцев и открытых водоисточников.
Ящики управления обеспечивают:
-подключение силовых цепей L1,L2,L3 к источнику переменного тока;
-включение и отключение электродвигателя насоса в соответствии с выбранным технологическим режимом;
-защиту электродвигателя от тока короткого замыкания и перегрузки;
-световую сигнализацию о включении ящика управления под напряжение и при неисправности пневмогидроаккумулятора;
-работу насоса в автоматическом и ручном режимах;
-защиту цепей управления;
-защиту мембраны пневмогидроаккумулятора;
Принцип работы реле давления.
Принцип действия реле основан на уравновешивании давления контролируемой среды внутри чувствительной системы (сильфонного устройства) силой упругих деформаций регулируемой пружины.
Отверстие ниппеля на входе имеет диаметр 2мм с целью предохранения от внезапной перегрузки давлением полости сильфона.
Рисунок 1 – Устройство датчика давления
1 — датчик давления; 2 — пружина; 3 — пружина; 4 — фиксирующая планка; 5 — регулировочный винт; 6 — регулировочный винт; 7 — пружина; 8 — рычаг; 9 — переключатель; 10 — щиток; 11 — гайка; 12 — колодка переключателя; 13 — элементы крепления заземления; 14 — ниппель.
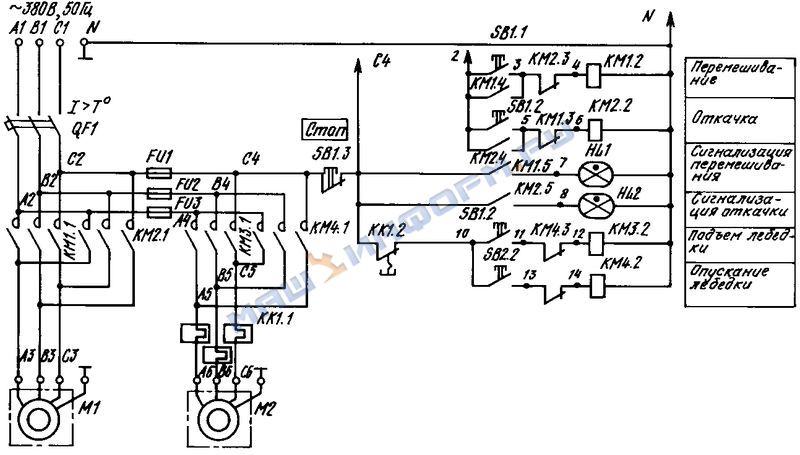
Задание 2. Изучить работу принципиальной электрической схемы безбашенной насосной установки.
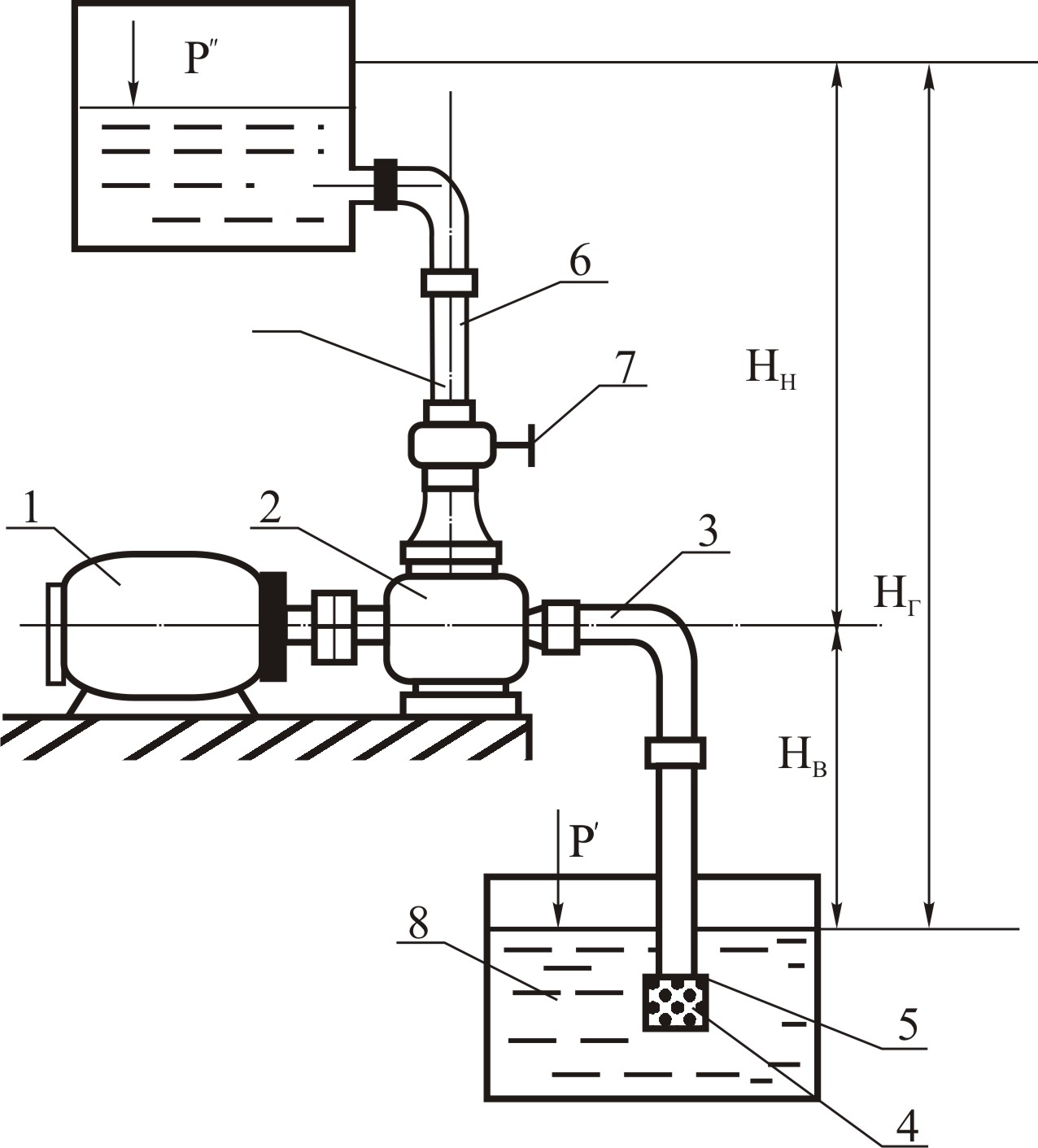
Устройство безбашенной насосной установки и принцип работы схемы управления. Автоматическая водоподъёмная установка типа ВУ с воздушно водяным котлом “гидропневматическим аккумулятором” предназначена для подъёма воды из открытых водоёмов и шахтных колодцев глубиной до 5м при напоре от 25 до80м.
Установка состоит из всасывающей трубы 1 с приёмным фильтром, насосного агрегата 2, нагнетательной 3 и водоразборной 12 труб с запирающими вентилями 5, воздушно-водяного бака 4 с датчиком давления 8 и струйным регулятором запаса воздуха, имеющим камеру смешивания 6, воздушный клапан 7, жиклёр 10 и диффузор 11. Схема управления в автоматическом режиме работает следующим образом. Вода к потребителю поступает под действием давления воздушной подушки, расположенной над водой в котле.
При разборе воды из котла давление в котле снижается, и замыкаются контакты манометрического датчика ВР, катушка магнитного пускателя КМ получает питание и включает электронасос. При повышении уровня воды давление, в котле повышается до заданного значения, при котором контакты ВР размыкаются и насос отключается. Ручное управление электронасосом осуществляется кнопками “Пуск” SВ2 и “Стоп” SВ1.
Объем воздушной подушки в баке постоянно уменьшается, так как часть воздуха растворяется и выносится с водой. Вследствие этого уменьшаются давление воздушной подушки и регулирующий объём воды в котле, а агрегат начинает чаще включаться в работу.
Вследствие этого уменьшаются давление воздушной подушки и регулирующий объём воды в котле, а агрегат начинает чаще включаться в работу.
Дня автоматического поддержания объема воздушной подушки служит струйный регулятор, который обеспечивает подкачку воздуха до давления в баке 250кПа. При максимальных аварийных давлениях срабатывает предохранительный клапан 9. Пополнение воздуха происходит, когда жиклер 10 перекрыт водой. Струя воды под давлением насоса создает разрежение в камере 6 «эффект пульверизации», воздушный клапан 7 открывается, и воздух, смешиваясь водой, поступает в котел.
Безбашенные водокачки имеют низкий коэффициент использования объема бака “0.15…0.2V”, большой перепад давлений “20…30м “ при малом регулирующем объеме Vp и взрывоопасны. Вследствие этого они широкого применения в сельском хозяйстве не нашли.
При наличии в скважине воды в зоне погружного насоса контакты датчика сухого ходаSLбудут замкнуты, а релеKV2будет держать в замкнутом состоянии свои контактыKV2. 1в цепи катушки магнитного пускателяКМ.
1в цепи катушки магнитного пускателяКМ.
В автоматическом режиме при уменьшении давления, когда вода из бака расходуется потребителями при отключенном насосе, подвижный стрелочный контакт манометраSPбудет перемещаться к неподвижному контакту 1, соответствующему давлению включения насоса, и при его касании магнитный пускательКМвключит электродвигатель погружного насоса и своими замыкающими контактамиКМ.2станет на самоподпитку.
При включении электронасосного агрегата в напорном трубопроводе возникает кратковременное повышение давления в момент трогания насоса. В этом случае подвижный контакт манометраSPможет коснуться контакта2,релеKV1может кратковременно разомкнуть свои контакты в цепи катушки пускателяКМ,но пускатель не отключится, так как питание его катушки будет осуществляться через контакты реле времениКТ.После разбега электронасосного агрегата и стабилизации давления реле времени разомкнет свои контактыКТ.При подъеме воды в напорном баке до установленного верхнего уровняВУ,соответствующего давлению отключенияр2,подвижный контакт манометраSPкоснется контакта2. РелеKV1,размыкая свои контактыKV1.1,отключит магнитный пускательКМи электродвигатель насоса. Вследствие разбора воды уровень ее в напорном баке будет снова снижаться, давление уменьшится и контактSPснова коснется контакта 1. Работа схемы повторится.
РелеKV1,размыкая свои контактыKV1.1,отключит магнитный пускательКМи электродвигатель насоса. Вследствие разбора воды уровень ее в напорном баке будет снова снижаться, давление уменьшится и контактSPснова коснется контакта 1. Работа схемы повторится.
Для регулирования частоты вращения погружных насосов, а следовательно, и их подачи можно использовать преобразователь частоты, автоматически изменяющий частоту в зависимости от давления. Например, при уменьшении расхода воды потребителями увеличится давление в водопроводной сети. Датчик давления должен выдать сигнал на уменьшение частоты преобразователя, а следовательно, и на уменьшение частоты вращения электродвигателя насоса, уменьшая подачу насоса в соответствии с уменьшением расхода воды потребителями. Такие системы особенно перспективны на крупных животноводческих комплексах, так как они не только продлят срок службы скважин, но и исключат громоздкие водонапорные башни и насосные станции второго подъема, имеющие значительную стоимость.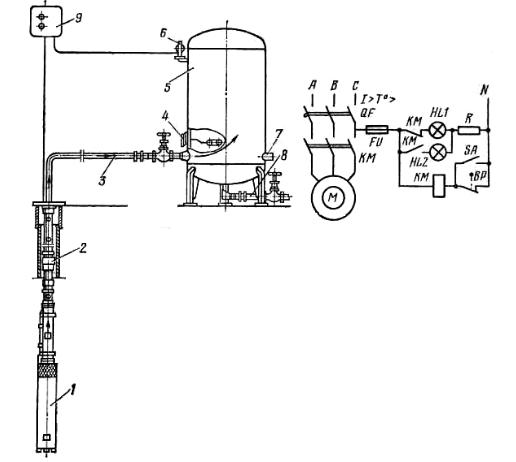
Задание 3. Собрать схему управления безбашенной насосной установки на лабораторном стенде.
Содержание отчета учащихся:
1.Тема и цель работы.
2.Вычертить технологическую и принципиальную электрическую схему управления.
3. Ответить на контрольные вопросы.
Перечень вопросов для контроля и самоконтроля учащихся:
1. Перечислите основные элементы автоматики, используемые при управлении безбашенной насосной установкой.
2. Опишите работу принципиальной электрической схемы управления.
3. Обоснуйте достоинства и недостатки безбашенных насосных установок.
4. Обьясните устройство и принцип работы датчика-реле давления.
Обьясните устройство и принцип работы датчика-реле давления.
5. Поясните, как автоматически поддерживается объём воздушной подушки в баке?
Возможно эти работы будут Вам интересны.
1. Исследование работы схемы управления башенной насосной установки
2. Исследование работы схемы управленияпастеризационно-охладительной установки
3. Исследование работы схемы управления поточной линии запаривания картофеля
4. Исследование работы схемы управления микроклиматом построенной на релейно-контактных элементах
5. Электрооборудование и работа насосной установки с задвижкой
6. Изучение конструкции установки и исследование режимов работы модулируемой системы СЭПП
7. Исследование схемы управления навозоуборочного транспортера
8. Разработка технологической схемы абсорбционной установки
9. Типизированные схемы управления в АСУ
Типизированные схемы управления в АСУ
10. Описание устройства и работы автоматической системы, разработка ее функциональной схемы
§ 22. Машинист насосной установки железнодорожного водоснабжения
§ 22. МАШИНИСТ НАСОСНОЙ УСТАНОВКИ
ЖЕЛЕЗНОДОРОЖНОГО ВОДОСНАБЖЕНИЯ
Характеристика работ. Обслуживание насосно-силового оборудования, двигателей внутреннего сгорания, паровых, водогрейных, электрических котлов и другого оборудования насосных установок железнодорожного водоснабжения: пуск, регулирование режима работы и остановки двигателей и насосов, переключения в системе трубопроводов насосных установок. Наблюдение за контрольно-измерительными приборами. Текущий ремонт оборудования насосных установок железнодорожного водоснабжения. Управление работой хлораторной установки. Приготовление реагентов для хлорирования воды. Проведение анализов воды на остаточный хлор. Обслуживание устройств водоснабжения и водоотведения структурных подразделений железнодорожного транспорта: всасывающих трубопроводов, напорно-разводящих водопроводных сетей с запорной арматурой, водоразборных кранов и сооружений. Наблюдение за уровнем воды в источнике, за состоянием и работой гидротехнических сооружений. Содержание санитарных зон в надлежащем состоянии. Подготовка устройств водоснабжения и водоотведения структурных подразделений железнодорожного транспорта к зимней работе. Обеспечение водой поездов и других технических и хозяйственно-бытовых потребностей структурных подразделений железнодорожного транспорта.
Наблюдение за уровнем воды в источнике, за состоянием и работой гидротехнических сооружений. Содержание санитарных зон в надлежащем состоянии. Подготовка устройств водоснабжения и водоотведения структурных подразделений железнодорожного транспорта к зимней работе. Обеспечение водой поездов и других технических и хозяйственно-бытовых потребностей структурных подразделений железнодорожного транспорта.
Должен знать: устройство, принцип действия и правила эксплуатации насосов, двигателей, приводящих их в действие, резервного энергооборудования, приборов автоматического управления агрегатами насосной установки железнодорожного водоснабжения; схему всасывающих, напорных и разводящих трубопроводов; конструкцию и принцип действия запорной арматуры на трубопроводах; устройство элементов водоснабжения и водоотведения структурных подразделений железнодорожного транспорта, артезианских скважин, гидротехнических и водонапорных сооружений, водоразборных колонок и кранов для заправки вагонов пассажирских поездов и мойки подвижного состава.
При обслуживании насосной установки железнодорожного водоснабжения с
подачей воды до 500 куб. м в сутки - 2-й разряд.
При обслуживании насосной установки железнодорожного водоснабжения с
подачей воды от 500 до 1000 куб. м в сутки - 3-й разряд.
При обслуживании насосной установки железнодорожного водоснабжения с
подачей воды от 1000 до 2000 куб. м в сутки - 4-й разряд.
При обслуживании насосной установки железнодорожного водоснабжения с
подачей воды от 2000 до 2500 куб. м в сутки - 5-й разряд.
При обслуживании насосной установки железнодорожного водоснабжения с
подачей воды свыше 2500 куб. м в сутки - 6-й разряд.
Примечание. Старший машинист насосной установки железнодорожного водоснабжения тарифицируется на один разряд выше машиниста насосной установки железнодорожного водоснабжения высшей квалификации, работающего под его руководством.
Открыть полный текст документа
Насосная станция модульная на общей раме НСЧРП-22 – ООО «Росавтоматизация»
Комплектная модульная насосная станция на общей раме с каскадным режимом работы с преобразователем частоты
Состав изделия.НС представляет собой модульную конструкцию (Рис. 1), где на общей раме смонтированы все необходимые элементы, в совокупности обеспечивающие функциональное назначение изделия: насосы, задвижки и обратные клапаны, впускной и напорный коллекторы, шкаф управления, датчик давления, сигнализирующие манометры для защиты от сухого хода. Гидравлическая схема НС представлена на Рис. 2.
1 – впускной коллектор,2 – задвижки,
3 – напорный коллектор,
4 – задвижки,
5 – обратные клапаны,
6 — шкаф управления ШУ НС,
7 – манометр сигнализирующий впускного коллектора,
8 — манометр сигнализирующий напорного коллектора,
9 – датчик давления,
10 – насос Н2,
11 – насос Н1.
Шкаф управления ШУ НС конструктивно выполнен в виде металлического щита с дверью на лицевой стороне и монтажной панелью внутри. Органы управления расположены на двери.Расположение органов управления и светосигнальной арматуры на лицевой панели шкафа управления показано на Рис. 3.
HL1 — лампа желтая «Сеть 380В»;
HL2 – лампа красная «Насос 1 Авария»;
HL3 – лампа красная «Насос 2 Авария»;
HL4 – лампа зеленая «Насос 1 Работа»;
HL5 – лампа зеленая «Насос 2 Работа»;
QS1 – рукоятка выключателя-разъединителя «Сеть ON/OFF»;
SA1 – переключатель «Режим Авт./Ручн.»;
SB1 – кнопка «Пуск Насос 1»;
SB2 – кнопка «Стоп Насос 1»;
SB3 – кнопка «Пуск Насос 2»;
SB4 – кнопка «Стоп Насос 2»;
UZ1 LCP – панель управления преобразователя частоты Omron RX.
На монтажной панели внутри ШУ НС расположены следующие основные элементы:
На монтажной панели внутри ШУ НС расположены следующие основные элементы:
A1 – блок питания =24В; 1,3А;
А2 – программируемый контроллер Siemens Logo! 12/24RC;
А3 – модуль расширения Siemens Logo! DM16 24R;
КМ1 – пускатель магнитный – работа насос 1 через преобразователь частоты;
КМ2 – пускатель магнитный – работа насос 1 напрямую;
КМ3 – пускатель магнитный – работа насос 2 через преобразователь частоты;
КМ4 – пускатель магнитный – работа насос 2 напрямую;
KF1 – реле контроля фаз;
SF1 — выключатель автоматический цепей управления;
QF1 – выключатель автоматический преобразователя частоты;
QF2, QF3 – мотор-автомат электродвигателя насоса;
QS1 — выключатель-разъединитель «Сеть ON/OFF»;
UZ1 – Преобразователь частоты Omron RX;
XT2 – Клеммы для подключения силовых кабелей электродвигателей насосов;
XT3 – Клеммы для подключения внешних сигнальных проводников;
XT4 — Клеммы для подключения сигнальных проводников аппаратуры, расположенной на двери шкафа управления.
Аппаратура по месту:
BP1 — датчик давления Danfoss MBS3000, 0-10bar, 4-20мА;
S3, S4 – манометр сигнализирующий ДМ2010СгУ2, 0-10кг/см2;
M1, М2 – насос Pedrollo F50/200AR, 22кВт, Q=103 м3/ч, H=56м.
Принцип работы насосной станции с преобразователем частоты.
Насосная станция обеспечивает подачу воды в системе водоснабжения с заданным давлением в независимости от разбора. Поддержание давления обеспечивается встроенным преобразователем частоты по сигналу от аналогового датчика давления. Регулирование осуществляется плавно, бесступенчато и безударно.
С помощью преобразователя частоты происходит автоматическая регулировка производительности насоса. При необходимости увеличить производительность насоса преобразователь частоты увеличивает частоту вращения насоса, если необходимо уменьшить производительность – уменьшает.
Подготовка к работе насосной станции.
Механический монтаж.
Установить НС на место ее постоянной эксплуатации.
Подключить к водопроводной сети всасывающий и напорный коллекторы.
Электрические подключения.
Произвести заземление рамы НС к существующему контуру заземления. Сечение заземляющего проводника должно быть не меньше 16 мм2.
Подключить проводники внешних подключений согласно электрической принципиальной схеме.
Включить автоматические выключатели.
Подать на шкаф управления напряжение питания 380 В.
Осуществить пробный запуск насосов и определить правильность направления вращения крыльчаток (направление вращения можно определить по стрелке на корпусе насоса). Если смотреть со стороны вентилятора электродвигателя – правильное направление – по часовой стрелке.
Работа насосной станции с преобразователем частоты.
1. Подать напряжение питания на ШУ, путем поворота по часовой стрелке до положения «ON» рукоятки выключателя нагрузки QS1 (Рис. 3). При этом должна загореться лампа HL1 «Сеть 380В».
2. Задать требуемую уставку давления на панели преобразователя частоты UZ1 LCP. Уставка давления задается в процентах от 0,00% до 100,00% в параметре F001. При этом 0,00% соответствует давление 0 кс/см2; 100,00% соответствует давление 10 кг/см2. Текущее значение уставки отображается в нижней строке на дисплее панели. Для изменения уставки давления необходимо:
— последовательно два раза нажать кнопку «Enter» желтого цвета. При этом параметр F001 будет доступен для редактирования – подсветится темным фоном,
— кнопками «Стрелка влево» и «Стрелка вправо» выбрать изменяемый разряд (целые, десятые и т.п.),
— кнопками «Стрелка вверх» и «Стрелка вниз» изменить значение выбранного разряда,
— для завершения редактирования нажать кнопку «ESC».
3. Перевести переключатель SA1 «Режим» в левое положение «Авт.». При этом произойдет запуск насоса. Загорится лампа HL4 «Насос1 Работа» или HL5 «Насос2 Работа». Станция начнет работать в автоматическом режиме.
4. Для отключения работы станции (для остановки насоса) перевести переключатель SA1 «Режим» в среднее положение.
5. В случае возникновения аварийной ситуации или неполадок преобразователя частоты, датчика давления (невозможен запуск в автоматическом режиме), а также в целях использования насосной станции для тушения пожара предусмотрена функция прямого запуска насосов в «ручном» режиме. При этом не контролируется давление – насос/насосы работают на полную мощность без использования преобразователя частоты. Работа в «ручном» режиме осуществляется только под контролем и под ответственность обслуживающего персонала. Для запуска насосов в ручном режиме необходимо перевести переключатель SA1 «Режим» в правое положение «Ручн.», нажать кнопку SB1 «Насос1 Пуск» и/или SB3 «Насос2 Пуск».
Для останова насосов в ручном режиме нажать кнопку SB2 «Насос1 Стоп» и/или SB4 «Насос2 Стоп».
Описание электрической принципиальной схемы шкафа управления насосной станции ШУН с преобразователем частоты.
 Питание электрооборудования насосной станции осуществляется от трехфазной сети переменного тока напряжением 380В.
Питание электрооборудования насосной станции осуществляется от трехфазной сети переменного тока напряжением 380В. При переключении вводного выключателя-разъединителя QS1 в положение «ON» напряжение питания 380В параллельно поступает на:
— реле контроля фаз KF1;
— автоматический выключатель QF1 преобразователя частоты;
— мотор-автоматы QF2, QF3 электродвигателей насосов;
и 220В параллельно поступает на:
— лампу HL1 «Сеть»;
— автоматический выключатель SF1 цепей управления.
При включении автоматического выключателя QF1 напряжение 380В поступает на силовые клеммы преобразователя частоты UZ1.
При включении мотор-автомата QF2 напряжение 380В поступает на магнитный пускатель KM2.
При включении мотор-автомата QF3 напряжение 380В поступает на магнитный пускатель KM4.
При включении автоматического выключателя SF1 напряжение 220В поступает на:
— блок питания A1 — выходное напряжение 24В постоянного тока.
— питание релейных выходов Q1, Q2, Q3, Q4, Q9, Q10, Q11, Q12 программируемого контроллера A2.
С выхода блока питания A1 напряжение =24В поступает на:
— питание контроллера A2 и его модуля расширения A3;
— дополнительные контакты мотор-автоматов QF2.K и QF3.K;
— переключатель SA1 «Режим»;
— дополнительные контакты магнитных пускателей KM1.K1 и KM3.K1;
— сигнальные контакты S3, S4 манометра ДМ2010.
При наличии питающего напряжения на силовых клеммах преобразователя частоты UZ1:
— переходит в рабочее состояние (светится) его панель управления UZ1.LCP;
— со встроенного блока питания преобразователя частоты напряжение =10В поступает на датчик давления BP1;
— со встроенного блока питания преобразователя частоты напряжение =24В поступает на питание релейных выходов Q5, Q6, Q7, Q8 программируемого контроллера A2.
Если мотор-автомат QF2 включен, то =24В поступает через сигнальный контакт QF2.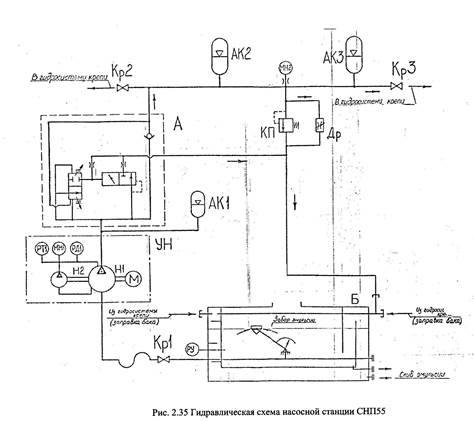 K на дискретный вход I1 контроллера A2.
K на дискретный вход I1 контроллера A2.
Если мотор-автомат QF3 включен, то =24В поступает через сигнальный контакт QF3.K на дискретный вход I2 контроллера A2.
Запуск насоса в автоматическом режиме (через преобразователь частоты).
При повороте переключателя SA1 «Режим» в левое положение «Авто» =24В поступает на дискретный вход I3 контроллера A2. После этого происходит инициализация запуска насоса через преобразователь частоты (далее рассмотрен только алгоритм запуска насоса Н1, запуск насоса Н2 происходит таким же образом):
1) Замыкается релейный выход Q1 контроллера A2 и 220В поступает через НЗ дополнительный контакт KM2.K2 (защита от одновременного включения KM1 и KM2) на катушку пускателя KM1.
2) Через НО дополнительный контакт KM1.K1 =24В поступает на дискретный вход I13 контроллера A2 (проверка, что KM1 замкнулся).
3) Замыкается релейный выход Q5 контроллера A2 и =24В с клеммы P24 преобразователя частоты поступает на клемму FW преобразователя частоты (сигнал пуск преобразователя частоты).
4) После запуска преобразователя частоты с его дискретного выхода (клемма 14) =24В поступает на дискретный вход I10 контроллера A2 (проверка, что преобразователь частоты работает).
5) Замыкается релейный выход Q11 контроллера A2 и 220В поступает на лампу HL4 «Насос 1 работа».
Насос Н1 работает в штатном режиме.
Останов насоса в автоматическом режиме (через преобразователь частоты).
При повороте переключателя SA1 «Режим» в среднее положение «0» =24В пропадает с дискретного входа I3 контроллера A2. После этого происходит инициализация останова насоса через преобразователь частоты (далее рассмотрен только алгоритм запуска насоса Н1, запуск насоса Н2 происходит таким же образом):
1) Размыкается релейный выход Q5 контроллера A2 и =24В пропадает с клеммы FW преобразователя частоты (сигнал стоп преобразователя частоты).
2) С дискретного выхода преобразователя частоты (клемма 14) пропадает =24В и соответственно с дискретного входа I10 контроллера A2
3) Размыкается релейный выход Q11 контроллера A2 и гаснет лампа HL4 «Насос 1 работа». Насос Н1 остановлен.
Насос Н1 остановлен.
4) Размыкается релейный выход Q1 контроллера A2 и происходит отключение магнитного пускателя KM1.
5) Через НО дополнительный контакт KM1.K1 =24В перестает поступать на дискретный вход I13 контроллера A2 (проверка, что KM1 разомкнулся).
Насос Н1 остановлен.
Запуск насоса в ручном режиме (напрямую).
При повороте переключателя SA1 «Режим» в правое положение «Ручной» =24В поступает на:
— кнопку SB1 «Прямой пуск Н1»;
— кнопку SB2 «Прямой стоп Н1»;
— кнопку SB3 «Прямой пуск Н2»;
— кнопку SB4 «Прямой стоп Н2»;
При нажатии кнопки SB1 «Прямой пуск Н1» =24В поступает на дискретный вход I4 контроллера A2, происходит запуск насоса Н1 напрямую (без преобразователя частоты):
1) Замыкается релейный выход Q1 контроллера A2 и 220В поступает через НЗ дополнительный контакт KM1.K2 (защита от одновременного включения KM1 и KM2) на катушку пускателя KM2.
2) Через НО дополнительный контакт KM2. K1 =24В поступает на дискретный вход I14 контроллера A2 (проверка, что KM2 замкнулся).
K1 =24В поступает на дискретный вход I14 контроллера A2 (проверка, что KM2 замкнулся).
3) Замыкается релейный выход Q11 контроллера A2 и 220В поступает на лампу HL4 «Насос 1 работа».
Насос Н1 работает в ручном режиме.
Запуск насоса в ручном режиме (напрямую).
При нажатии кнопки SB2 «Прямой стоп Н1» =24В пропадает с дискретного вход I5 контроллера A2, происходит останов насоса Н1:
1) Размыкается релейный выход Q1 контроллера A2 и отключается магнитный пускатель KM2.
2) Через НО дополнительный контакт KM2.K1 =24В перестает поступать на дискретный вход I14 контроллера A2 (проверка, что KM1 разомкнулся).
3) Размыкается релейный выход Q11 контроллера A2 гаснет лампа HL4 «Насос 1 работа».
Насос Н1 остановлен.
Запуск и останов насоса Н2 в ручном режиме происходит аналогично.
Насосная станция для водоснабжения многоквартирного дома
Инженерные коммуникации – неотъемлемая техническая составляющая любого здания, независимо от его назначения.
Оказывая прямое влияние на условия проживания и уровень комфортабельности жильцов в многоквартирных домах, инженерно-технические системы классифицируются на узлы разной степени необходимости, наиболее важным из которых является водоснабжение.
Именно на техническое состояние и возможности сетей инженерно-технического обеспечения в первую очередь обращают внимание и специалисты в области продажи жилой недвижимости, и покупатели квартир в многоэтажных домах, особенно на рынке вторичного жилья.
Из чего состоит водопроводная сеть многоэтажки?
Система водоснабжения многоквартирного дома – один из наиболее сложных инженерных объектов, представляющих собой объемный разветвленный комплекс взаимосвязанных между собой элементов, узлов и механизмов, служащих для подачи воды потребителям. Делится на внешние (наружные) и внутренние сети водоснабжения.
- Наружные сети – все элементы водопроводной системы, проложенные за пределами здания.
 Внешние системы водообепечения состоят из водозаборных узлов, смотровых колодцев, систем водоподготовки, очистных устройств, насосной станции и, непосредственно, трубопровода. Наружные сети обслуживаются ресурсоснабжающими организациями в сфере ЖКХ – водоканалом и теплоснабжающей компанией.
Внешние системы водообепечения состоят из водозаборных узлов, смотровых колодцев, систем водоподготовки, очистных устройств, насосной станции и, непосредственно, трубопровода. Наружные сети обслуживаются ресурсоснабжающими организациями в сфере ЖКХ – водоканалом и теплоснабжающей компанией. - Внутренние сети находятся внутри сооружения и обеспечивают подачу воды от наружного водопровода до потребителей в квартирах. Внутридомовая система водоснабжения разграничивается определенными зонами ответственности между управляющей компанией и собственником жилой недвижимости. В структуру участка внутренней водопроводной сети входит комплекс насосного оборудования, внутридомовая и поквартирная разводка труб, магистрали, стояки, фильтрационные системы, а также арматура различного типа: водоразборная, запорная и регулирующая.
Оптимальным вариантом для жильцов многоквартирного дома является подача воды от центрального водопровода – централизованное водоснабжение может обеспечить неограниченными объемами водных ресурсов большое количество потребителей.
Особенности водоснабжения высотных зданий
Отличительная особенность многоквартирного дома – большое количество потребителей. Каждая квартира представляет собой отдельный объект, в котором может быть размещено несколько независимых друг от друга точек водозабора. Система должна функционировать таким образом, чтобы обеспечивать необходимым количеством воды каждую точку. Именно поэтому налаживание водоснабжения многоэтажного дома – не простая техническая задача.
Кроме трубопроводной сети, представляющей собой комплекс со сложными внутридомовыми и внутриквартирными разводками, водопроводная система высотного здания в обязательном порядке включает в себя насосное оборудование, обеспечивающее гидравлическую устойчивость системы водоснабжения.
Слабый напор на верхних этажах высотного строения – довольно частое явление, причин у которого может быть несколько, а решение одно – установка повысительной насосной станции, стабильно поддерживающей оптимальное давление в системе.
При выборе насосного оборудования для многоэтажки необходимо учитывать требуемую производительность – исходя из этих данных, подбираются насосы, оптимально подходящие для решения поставленных задач. Мощность станции должна соответствовать пиковым показателям потребления воды на рабочих точках. Гидравлические расчеты осуществляются инженерами и проектировщиками и позволяют:
- Уточнить все необходимые параметры системы водоснабжения;
- Выполнить подбор необходимого оборудования, правильного диаметра труб и допустимых показателей их эксплуатации;
- Рассчитать предполагаемый расход воды.
Регламентирующими документами и правилами СНиП предусмотрено максимально допустимое давление водяного столба в системе водоснабжения многоквартирного дома – не более шести атмосфер в месте ответвления квартирной разводки от главного стояка. Расчет водоснабжения многоквартирного дома выполняется в строгой последовательности действий, технические решения подробно отражены в рабочем проекте.
Структура и схема работы повышающей насосной станции
Насосная станция для обеспечения стабильного давления в водопроводе – совершенно необходимый элемент системы водоснабжения жилого многоквартирного дома, жилого района или крупного производственного объекта, без которого циркуляция и поддержание давления было бы невозможно.
Зачастую местом монтажа оборудования выбирается участок трубопровода, расположенный между устройством забора жидкости и конечными потребителями. В большинстве случаев насосные установки управляются автоматическим способом с помощью дистанционных пультов.
В структуру современных повышающих насосных станций входит от двух до шести силовых модулей, каждый из которых закреплен на единой раме, но функционируют в единой связке. Схема работы оборудования в автоматическом режиме выглядит следующим образом:
- Первый насос начинает функционировать на минимальных показателях мощности сразу при старте водопотребления, если расход увеличивается, мощность насоса автоматически возрастает, при этом давление в водоснабжающей системе остается неизменным.

- При дальнейшем увеличении водопотребления начинают последовательно активироваться остальные насосы, входящие в станцию.
Насосные станции могут эксплуатироваться как в системе холодного, так и горячего водоснабжения. Оборудование классифицируется на одноступенчатые и многоступенчатые агрегаты, которые считаются более производительными и используются для организации системы водоснабжения крупных или высотных объектов.
Где купить качественный насос?
Компания «JETEX» – ведущий российский производитель высокоэффективного насосного оборудования отличного качества. Предприятие предлагает широкий ассортимент насосов, предназначенных для совершенно разнообразных нужд: от агрегатов, предназначенных для установки в частном секторе, до крупнейших смонтированных гидравлических установок, обеспечивающих функционирование крупнейших организаций промышленных сфер.
Насосные станции для водоснабжения многоквартирного дома представлены в многообразии вариантов оборудования, различного по своей мощности, производительности и другим параметрам. Вся предлагаемая продукция имеет сертификаты, подтверждающие соответствие международным и российским стандартам качества и безопасности (ГОСТ, ГОСТ Р, ГОСТ Р МЭК, ТУ, Технического регламента).
Вся предлагаемая продукция имеет сертификаты, подтверждающие соответствие международным и российским стандартам качества и безопасности (ГОСТ, ГОСТ Р, ГОСТ Р МЭК, ТУ, Технического регламента).
Насосы JETEX отличаются надежностью, эффективностью и по сравнению с импортными аналогами имеют доступную для российских потребителей стоимость. В электронном каталоге на сайте компании «JETEX» можно ознакомиться с моделями предлагаемого производителем оборудования и оформить заказ в режиме онлайн.
Специалисты компании «JETEX» всегда готовы посодействовать и помочь в подборе оборудования, оптимально соответствующего поставленным задачам – свяжитесь с менеджером любым удобным для вас способом.
Устройство и принцип действия центробежного насоса
9 апреля 2018
Насосы центробежного типа – один из наиболее популярных типов насосного оборудования. Современные производители предлагают множество моделей для бытового и промышленного применения. Устройства используются в технологических процессах, для забора жидких сред из скважин с последующей транспортировкой по горизонтали или подъемом на требуемую высоту, осушения подвалов. С помощью центробежных моделей организуют полив, водоснабжение животноводческих хозяйств, создают автономные системы водоснабжения.
Устройства используются в технологических процессах, для забора жидких сред из скважин с последующей транспортировкой по горизонтали или подъемом на требуемую высоту, осушения подвалов. С помощью центробежных моделей организуют полив, водоснабжение животноводческих хозяйств, создают автономные системы водоснабжения.
Особенности конструкции и принцип действия центробежного насоса
Независимо от модели, центробежные агрегаты включают:
- Корпус с входным и выходным патрубками. Обычно имеет конфигурацию, напоминающую улитку.
- Электродвигатель. Для обеспечения бесперебойной работы двигатель располагают в герметичном пространстве, защищенном от попадания рабочих сред.
- Вал. Передает крутящий момент от двигателя к рабочему колесу, на внешней поверхности которого расположены лопатки. Они предназначены для перемещения рабочей среды по внутренней камере.
- Подшипниковые узлы. Облегчают вращение вала.
- Уплотнения. Защищают внутренние компоненты агрегата от контакта с рабочими средами.
Дополнительно в устройство центробежного насоса входят конструктивные элементы, повышающие функциональность, безопасность и эффективность его использования:
- Шланги различного назначения.
- Обратный клапан, предохраняющий аппарат от возврата рабочей среды.
- Фильтр грубой очистки, устанавливаемый перед агрегатом. Предохраняет внутренние узлы устройства от повреждения крупными механическими включениями.
- Измерительные устройства – вакуумметры, манометры.
- Запорно-регулирующая трубопроводная арматура.
Принцип работы насосного оборудования этого типа:
- При включении электродвигателя начинает вращаться рабочее колесо, расположенное в наполненном водой корпусе.
- Под воздействием центробежной силы происходит вытеснение воды к наружным участкам камеры, а затем под действием созданного избыточного давления – в напорный трубопровод.
- Благодаря созданию избыточного давления у наружных стенок камеры, в центре рабочего колеса давление снижается. В агрегат поступает жидкость из всасывающего трубопровода, что обеспечивает непрерывную работу устройства.
Классификация центробежных насосов
По конструктивному исполнению различают следующие виды насосного оборудования:
- В зависимости от количества рабочих колес, центробежные агрегаты называют одно- или многоступенчатыми. Многоступенчатые модели обеспечивают высокий напор. Колеса могут иметь два диска – задний и передний или только задний. Модели первого типа используются в трубопроводах низкого давления или для перекачки густых жидких сред.
- По ориентации корпуса в пространстве – горизонтальные и вертикальные.
 На корпусе могут быть расположены один или два всасывающих патрубка.
На корпусе могут быть расположены один или два всасывающих патрубка. - По создаваемому давлению различают модели низкого (до 0,2 МПа), среднего (0,2-0,6 МПа), высокого (более 0,6 МПа) давления.
- По скорости вращения производители предлагают агрегаты – высокоскоростные, нормального и тихого хода.
- По назначению – центробежные насосы для перекачки воды, фекальные, дренажные, скважинные.
При выборе подходящей модели учитывают характеристики рабочего колеса:
- Материал изготовления. Сталь, чугун, медные сплавы – применяются для моделей, предназначенных для работы с неагрессивными средами. Для эксплуатации в контакте с химически активными средами востребованы колеса из современных керамических материалов.
- Технология производства. Литье и штамповка применяются для изготовления изделий, используемых в мощных агрегатах, клепка – для аппаратов низкой мощности.
- По конфигурации лопастей – прямых, загнутых в сторону вращения колеса или в противоположную сторону.
Поверхностные и погружные насосы: устройство, характеристики и области применения
Один из основных классификационных признаков – расположение установки во время работы.
Поверхностные агрегаты
Такие аппараты располагают на поверхности грунта, а в резервуар, емкость, водоем, колодец, отстойник опускают заборный шланг. Эти модели просты в монтаже, обслуживании и ремонте. Но есть и минусы, ограничивающие их область применения. К ним относятся:
- невысокая мощность, возможность забора жидкости с глубины не более 8-10 м;
- высокий риск поломки при работе на сухом ходу;
- меньшая, по сравнению с погружной помпой, производительность.
Погружные центробежные насосы
Агрегаты располагают в самой рабочей среде, фиксируя их с помощью троса на крепежном элементе, расположенном на поверхности грунта. К этим аппаратам предъявляются высокие требования по герметичности корпуса.
Преимущество погружных моделей – способность создавать высокий напор даже при небольших габаритах. К минусам относят сложность периодического обслуживания и проведения ремонтных работ.
При выборе подходящей модели центробежного насоса учитывают глубину, с которой будет производиться откачка жидкости и/или расстояние транспортировки по горизонтали, требуемую производительность, величину напора, характеристики рабочей среды, гидравлические показатели трубопроводной системы, энергоэффективность аппарата.
Штанговые насосные агрегаты — PetroWiki
Многие устройства подключаются к скважинному штанговому оборудованию через полированный шток на поверхности, который сообщает возвратно-поступательное движение колонне штанг и насосу. В истории насосных штанговых насосов автономная наземная насосная установка стала хорошо зарекомендовавшей себя технологией. В продаже имеется много типов насосных агрегатов. Наиболее широко используемые имеют шагающую балку в качестве горизонтального несущего элемента и стойку сампсона, которая поддерживает балку вертикально. Эти терминология и конфигурации были адаптированы из кабельных буровых установок, используемых для бурения ранних нефтяных скважин, и преобразованы в обычную насосную установку.
Эти терминология и конфигурации были адаптированы из кабельных буровых установок, используемых для бурения ранних нефтяных скважин, и преобразованы в обычную насосную установку.
API стандартизировал конструкцию, терминологию и многие компоненты, используемые для насосных агрегатов, в API Spec. 11E . [1] ISO приняла использование этого стандарта в качестве основы для ускорения публикации стандарта ISO Standard 10431 . [2] В настоящее время это сопоставимые стандарты и охватывают два основных компонента, составляющих насосный агрегат: зубчатый редуктор и конструкцию.Они стандартизированы отдельно, поскольку производитель редуктора может быть отделен от производителя конструкции, который будет нести ответственность за сборку.
Обозначение агрегата
Насосный агрегат получается, когда зубчатый редуктор и конструкция соединяются вместе. Эти агрегаты имеют номинальный размер, который описывает возможности агрегата с номиналом редуктора, максимальной конструктивной способностью и максимальной длиной хода.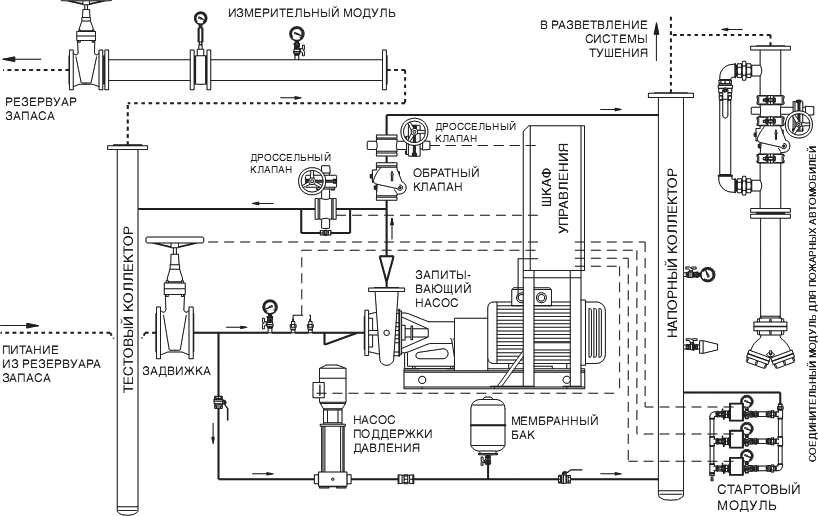 Номер редуктора — это максимальный номинальный крутящий момент в фунт-сила-дюйм.делится на 1000. Номер конструкции — это максимальная нагрузка на балку в фунтах-силах, деленная на 100, а максимальная длина хода — в дюймах. В результате получается описание из трех цифр, разделенных дефисом, в диапазоне от 6,4-21-24 до 3,648-470-300 для 77 возможных стандартизованных единиц. Они описывают самую маленькую единицу с усилием 6400 фунт-сила-дюймов. редуктор, конструктивная нагрузка 2100 фунт-сила и 24 дюйма. ход до самого большого блока с 3 648 000 фунт-силы-дюйм. редуктор, конструкция на 47000 фунтов и 300 дюймов. Инсульт. Однако не все эти размеры агрегатов доступны от всех производителей во всех возможных конструктивных геометриях.
Номер редуктора — это максимальный номинальный крутящий момент в фунт-сила-дюйм.делится на 1000. Номер конструкции — это максимальная нагрузка на балку в фунтах-силах, деленная на 100, а максимальная длина хода — в дюймах. В результате получается описание из трех цифр, разделенных дефисом, в диапазоне от 6,4-21-24 до 3,648-470-300 для 77 возможных стандартизованных единиц. Они описывают самую маленькую единицу с усилием 6400 фунт-сила-дюймов. редуктор, конструктивная нагрузка 2100 фунт-сила и 24 дюйма. ход до самого большого блока с 3 648 000 фунт-силы-дюйм. редуктор, конструкция на 47000 фунтов и 300 дюймов. Инсульт. Однако не все эти размеры агрегатов доступны от всех производителей во всех возможных конструктивных геометриях.
Коммерчески доступные агрегаты дополнительно описываются путем добавления структурного типа или геометрии и, возможно, типа зубчатого редуктора [одинарный (без букв) или двойной (D)]. Как обычно,
- B для обычного блока со сбалансированным лучом
- C для обычного кривошипно-уравновешенного агрегата
- A для пневмобаллонного агрегата
- M предназначен для блока Mark II TM
- RM обозначает агрегат Reverse Mark TM (ранее назывался TorqMaster)
Пример обозначения для обычного насосного агрегата с кривошипно-балансирным механизмом и манометром 456 000 фунт-сила-дюйм.редуктор с двойным редуктором, конструкцией 30 500 фунтов силы и максимальной длиной хода 168 дюймов будет C456D-305-168.
Свяжитесь с производителями для получения информации об их обычном наличии, специальных конструкциях, размерах и типах продаваемых ими устройств. Однако Таблица 1 показывает минимальный и максимальный диапазоны размеров, коммерчески доступные от крупного производителя в США. [3]
Редуктор зубчатый
В настоящее время API Spec включает 18 типоразмеров зубчатых редукторов.11E . [1] Диапазон размеров от 6,4 до 3 648 или от 6 400 до 3 648 000 фунтов силы-дюймов. емкость. Когда эти редукторы помещены в их рабочий корпус и прикреплены к конструкции насосного агрегата, это оборудование обычно называют редуктором. В насосных агрегатах обычно используется одно- или двухступенчатая передача с понижением скорости примерно 30: 1 от первичного двигателя до скорости откачки. Стандарты также включают цепные редукторы, в которых используются звездочки и цепи для передачи скорости первичного двигателя через конструкцию на колонну штанг.Доступны приводы с одно-, двух- и трехступенчатым редуктором. Хотя это все еще возможная конструкция редуктора, они ограничены по мощности и обычно не используются.
Параметры передачи для скорости и жизни
Штанговые насосные агрегатымогут работать в широком диапазоне скоростей откачки. Было признано, что существует потребность в номинальной скорости откачки для определения параметров различных зубчатых редукторов. Первоначально в промышленности была принята номинальная скорость 20 об / мин. Это предполагает, что ход агрегата вверх и вниз образует один полный цикл хода.
По API Спец. 11E был пересмотрен с течением времени, номинальная скорость редукторов 456 и большего размера была снижена, поскольку было нецелесообразно ожидать, что большие редукторы будут работать со скоростью 20 об / мин с большей длиной хода и более крупными конструкциями. Фактически, промышленные установки с этими редукторами аналогичного размера могут работать со скоростью от 580 до 1750 об / мин. Стандарт 422.03, [4] Американской ассоциации производителей зубчатых передач (AGMA), который является основой для API Spec.11E , ограничивает скорость редуктора либо скоростью продольной оси любой ступени до 5000 футов / мин и / или скоростью любого вала до менее 3600 об / мин.
Следует отметить, что ни один из отраслевых стандартов API, ISO или AGMA [5] не определяет требуемый срок службы редуктора; тем не менее, практическое правило предполагает ожидаемый срок службы от 20 до 25 лет. Это предполагает, что коробка передач не перегружена и не эксплуатируется неправильно и обслуживается надлежащим образом. Один производитель насосных агрегатов разработал график (показан на рис.2 ), показывающий влияние на срок службы коробки передач из-за перегрузки мощности коробки передач (на основе личного общения с К. Хантом, Lufkin Industries). Это показывает, что, хотя текущие разработанные и изготовленные API редукторы могут быть перегружены без катастрофического отказа, в зависимости от величины перегрузки, ожидаемый срок службы должен быть сокращен.
Рис. 2 — Влияние перегрузки редукторов насосных агрегатов на ожидаемый ресурс.
AGMA Стандарт 2001-C95 [5] предоставляет способ расчета напряжения на зуб, который должен обеспечивать удовлетворительную работу в течение разумного времени.Если существующие расчеты используются и обрабатываются в обратном порядке для расчета срока службы приемлемой конструкции, то следует ожидать срок службы редуктора более 4 × 10 8 циклов при номинальной нагрузке по крутящему моменту. Это приведет к сроку службы — при постоянной скорости насосной установки 10 футов в минуту в течение каждого дня в году — более 76 лет. Однако это по-прежнему предполагает правильную установку, эксплуатацию и техническое обслуживание редуктора.
Типовые конструкции
Промышленные стандарты для насосных агрегатов разработали минимальные требования к проектированию и производству различных структурных компонентов — балок, валов, подвески, тормозов, конической головки, кривошипов и подшипников.Четыре основных стандартных геометрических варианта конструкции насосных агрегатов, охватываемых API Spec. 11E следующие:
- Задняя геометрия, рычажные системы класса I с противовесом кривошипа.
- Передняя геометрия, рычажные системы класса III с противовесом кривошипа.
- Передняя геометрия, рычажные системы класса III с воздушным противовесом.
- Задняя геометрия, рычажные системы класса I с фазированным противовесом.
Эти стандартизированные конструкции более широко известны под соответствующими обозначениями:
- Обычный
- Марк II TM
- Пневматическая балансировка
- Reverse Mark TM Ранние модели были известны как блоки TorqMaster.
Существуют вариации этой геометрии, например, для наклонных колодцев или низкопрофильный для полей с орошением над землей. Кроме того, существуют особые геометрические формы или конструкции, основанные на гидравлике, пневматике или ремнях. Поскольку на эти конструкции не распространяются отраслевые стандарты, рекомендуется, чтобы эти специальные устройства были правильно спроектированы, изготовлены в соответствии с отраслевыми стандартами качества, а также установлены и эксплуатируются в соответствии с рекомендациями производителя.
Выбор агрегата
Было опубликовано множество публикаций о преимуществах, недостатках и выборе различных стандартных геометрических форм и специальных насосных агрегатов, включая следующие:
Ниже приводится краткое описание и сравнение четырех стандартных насосных агрегатов.
Традиционная единица измерения, вероятно, является наиболее часто используемой единицей. Он прост в установке, имеет самый широкий диапазон доступных размеров, обычно имеет более низкие эксплуатационные расходы, чем другие агрегаты, не требует подъемного оборудования или жестких опор для изменения длины хода и может работать быстрее в скважинах, в которых свободное падение ограничивает скорость откачки. Максимальная скорость откачки для обычного агрегата в средней скважине оценивается в 70% от максимального свободного падения штанг в воздухе. Это сопоставимо с 63% для агрегатов с воздушным балансиром и 56% для агрегатов Mark II TM .Скорость свободного падения для условной единицы определяется по следующей формуле:
……………….. (1)
Скорость свободного падения снижена на 10 и 20% для пневмобаллонов и Mark II TM соответственно. Это означает, что в скважине со средним трением и глубиной 100 дюймов. с полированным ходом штанги упадут с максимальной скоростью 17,15 об / мин с обычным устройством, 15,43 об / мин с устройством с воздушной балансировкой и 13,72 об / мин для Mark II TM . Однако во время хода вниз не должно быть разделения между несущей балкой устройства и зажимом полированного штока.Эти скорости могут быть дополнительно уменьшены в скважинах с повышенным трением от плунжеров кольцевого композитного типа, наклонных отверстий, прилипания твердых частиц к скважинному насосу и / или очень вязкой нефти. Кроме того, традиционная геометрия устройства допускает вращение как по часовой стрелке, так и против часовой стрелки. Это может быть полезно для зубьев шестерни, которые повреждены в одном направлении из-за плохой эксплуатации или технического обслуживания, и может позволить вращение в противоположном направлении. Это продлит срок службы коробки передач.
В агрегатах с воздушным балансиром используется система рычагов, отличная от обычных агрегатов.Использование сжатого воздуха вместо тяжелых чугунных противовесов позволяет более точно управлять противовесом одним пальцем, который можно регулировать, не останавливая устройство. Устройство без противовесов весит намного меньше, чем обычное устройство сопоставимых размеров. Он также имеет более легкую основу и немного более светлый луч. Таким образом, его компактный размер и легкий вес имеют несколько преимуществ, особенно для портативных испытательных установок и для использования на морских платформах. Он также использует большее количество градусов хода кривошипа для завершения первой половины хода вверх, что имеет тенденцию уменьшать пиковую нагрузку.Это небольшое преимущество, если усталость штанги является проблемой. Однако возникают повышенные проблемы или проблемы с обслуживанием, особенно с утечкой через поршень, что может затруднить поддержание надлежащего давления воздуха. Кроме того, утечка также может вызвать разбрызгивание масла и, как следствие, воздействие на окружающую среду. Кроме того, конденсация воды в воздушной системе может вызвать повреждение, если она замерзнет, если не используется надлежащий антифриз.
Установка Mark II TM имеет выравнивающий подшипник между стойкой Samson и нагрузкой на скважину.Подшипник выравнивателя расположен впереди или сбоку от средней линии тихоходного вала. Это отличается от блока с воздушной балансировкой, в котором выравнивающий подшипник находится непосредственно над тихоходным валом. Расположение подшипников выравнивателя обеспечивает ход вверх приблизительно 195 ° и ход вниз 165 °. Это обеспечивает более медленный ход вверх с уменьшением ускорения на 20%, что приводит к снижению пиковой нагрузки на полированный стержень. Более медленный ход вверх также дает больше времени вязким жидкостям для заполнения цилиндра насоса и может увеличить объемный КПД насоса, но для этого требуется, чтобы агрегат работал только при вращении против часовой стрелки.
Хотя блоки Mark II TM аналогичного размера тяжелее и дороже, чем обычные блоки, заявленное снижение крутящего момента может сделать возможным использование блока Mark II TM на один размер меньше, чем требуется для обычного блока. Однако эти устройства не следует использовать, если ожидается высокая скорость откачки или динамометрические карты с недостаточным ходом, и / или имеются искривленные или наклонные скважины. Когда разрабатывается карта недостаточного хода или карта, которая не показывала ни недостаточного хода, ни перебега, обычное устройство или устройство обратной метки имеет более подходящую диаграмму допустимой нагрузки.
Устройство Reverse Mark TM классифицируется как рычажная система Класса I с задним расположением геометрии и противовесом с фазированным кривошипом. Фазированные кривошипы улучшают грузоподъемность; таким образом, как и Mark II TM , этот блок может иметь редуктор на один размер меньше, чем обычный блок. Однако это эмпирическое правило должно быть смягчено фактическими параметрами накачки и полученной формой динамометрической карты. Кроме того, фазовый кривошип также делает его однонаправленным.
У других специализированных единиц есть свои преимущества и недостатки, которые можно учитывать, если стандартные единицы не способны удовлетворить требования производственного проектирования. Независимо от того, какая единица выбрана, необходимо провести полный цикл экономического анализа для сравнения затрат на:
- Покупка
- Установка
- Техническое обслуживание
- Эксплуатация
- Ремонт
- Частота отказов
- Стоимость при перепродаже
Все эти параметры должны быть рассмотрены вместе с возможностью добычи необходимого объема жидкости с требуемой глубины скважины, чтобы решить, какая установка лучше всего подходит для конкретной скважины.
Калибровка
Существует множество методов определения требуемого размера редуктора для насосной установки, включая «приблизительный метод», «инженерный анализ» и кинематику. [1] [6] [7] [8] [12] [13] [14] [28] Сегодня большинство инженеров / операторов, выбирающих насос блок будет полагаться на выходные данные программы проектирования колонн штанг, которая рассчитывает максимальный крутящий момент на полированной штанге.Они основаны на методе API RP 11L [8] и расширении волновых уравнений, которые позволяют рассматривать геометрию, отличную от традиционной единицы измерения. Поскольку эти расчеты обеспечивают пиковые крутящие моменты на полированном стержне, крутящий момент должен передаваться через конструкцию и ее подшипники на коробку передач. Однако, поскольку эти подшипники не являются 100% эффективными, Gipson и Swaim [14] разработали кривые для выбора коробки передач, чтобы учесть эту неэффективность; Рис.1 показаны кривые потери эффективности как для новых, так и для бывших в употреблении агрегатов. Как правило, для этого требуется коробка передач по мощности примерно на 10 или 20% большей, чем максимальный крутящий момент, рассчитанный на полированном штоке для новых или бывших в употреблении агрегатов, соответственно. После определения допустимого максимального крутящего момента конструкции следует выбрать наиболее близкий из имеющихся, но с более высокими номинальными характеристиками, редуктор. Балку следует выбирать на основе расчетной пиковой нагрузки на полированную штангу из программы проектирования колонн штанг. Наконец, длину хода агрегата следует выбирать на основе требуемой производительности насоса с производственной подушкой от 10 до 20%.
Рис. 1 — Рекомендации по снижению номинальных характеристик стандартизированных зубчатых редукторов насосных агрегатов, основанные на расчетах колонны насосных штанг и имеющейся или выбранной коробке передач.
Специальные насосные агрегаты, а также требуемый редуктор, конструктивную способность и желаемую длину хода следует обсудить с производителем, чтобы гарантировать рабочие характеристики агрегата.
Монтаж, эксплуатация и обслуживание насосных агрегатов
Выпущено множество публикаций по установке, эксплуатации, техническому обслуживанию и смазке насосных агрегатов. [12] [13] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] Эти документы были включены в API RP 11G1 [66] , чтобы отразить минимальные рекомендуемые методы, рассматриваемые для установки, эксплуатации и смазки насосной установки. Кроме того, производители устройств могут иметь свои собственные документы и рекомендуемые процедуры по установке, эксплуатации и техническому обслуживанию, которым необходимо следовать.
Охранник
Надлежащая охрана насосной установки имеет решающее значение. Промышленный стандарт, Американский национальный институт стандартов (ANSI) / API RP 11ER , [67] , следует соблюдать при защите насосного агрегата, клиновых ремней, шкивов, маховиков, кривошипов, противовесов и движущихся частей на насосных агрегатах. . Крупные производители насосных агрегатов также являются отличными источниками рекомендаций по защите и обычно могут поставлять ограждения, которые будут соответствовать особым нормативным требованиям.
Номенклатура
| S | = | длина хода поверхности, дюйм. |
Список литературы
- ↑ 1,0 1,1 1,2 1,3 API Spec. 11Е, Технические условия на насосные агрегаты, 17-е издание. 1994. Вашингтон, округ Колумбия: API (ноябрь 1994 г. / подтверждено в январе 2000 г.).
- ↑ ISO Spec. 10431, Технические условия для нефтяной и газовой промышленности — Насосные агрегаты.1993. ISO.
- ↑ Общий каталог Группы нефтепромысловых продуктов. 2001. Луфкин, Техас: Lufkin Industries Inc.
- ↑ AGMA 422.03, Практика винтовых и елочных редукторов для нефтепромысловых насосных агрегатов. 1998. Александрия, Вирджиния: Американская ассоциация производителей шестерен.
- ↑ 5,0 5,1 AGMA 2001-C95, Основные номинальные коэффициенты и метод расчета для зубьев эвольвентных, прямозубых и косозубых зубчатых колес. 2001. Александрия, Вирджиния: Американская ассоциация производителей шестерен.
- ↑ 6,0 6,1 6,2 6,3 Заба, Дж. 1962. Современная перекачка нефтяных скважин. Талса, Оклахома: Petroleum Publishing Co.
- ↑ 7,0 7,1 7,2 7,3 Такач Г., 1993. Современная насосная штанга. PennWell Books, Талса, Оклахома, 230 стр. http://www.worldcat.org/oclc/27035195
- ↑ 8,0 8,1 8,2 API RP 11L, Рекомендуемая практика для расчетов при проектировании насосных систем со штангой, четвертое издание, Опечатка 1.Вашингтон, округ Колумбия: API, Вашингтон, округ Колумбия.
- ↑ Свинос, Дж. 1983. Точный кинематический анализ насосных агрегатов. Представлено на Ежегодной технической конференции и выставке SPE, Сан-Франциско, Калифорния, США, 5–8 октября. SPE-12201-MS. http://dx.doi.org/10.2118/12201-MS
- ↑ 10,0 10,1 Заба, Дж. 1943. Методы откачки нефтяных скважин: Справочное руководство для добытчиков. Oil & Gas J (июль).
- ↑ 11,0 11,1 Доннелли, Р.В.1986. Добыча нефти и газа: перекачка луча. Даллас, Техас: PETEX, Техасский университет.
- ↑ 12,0 12,1 12,2 12,3 Frick, T.C. 1962. Справочник по добыче нефти, Vol. 1. Даллас, Техас: Общество инженеров-нефтяников.
- ↑ 13,0 13,1 13,2 Брэдли, Х. 1987. Справочник по нефтяной инженерии. Ричардсон, Техас: SPE.
- ↑ 14,0 14,1 14,2 Гипсон, Ф.W. и Swaim, H.W. 1988. Цепь проектирования балочной откачки. Представлено на кратком курсе Southwestern Petroleum Short Course 1988 г., Лаббок, Техас, 23–25 апреля.
- ↑ Клегг, Дж. Д. 1988. Высокоскоростной искусственный подъемник. J Pet Technol 40 (3): 277-282. SPE-17638-PA. http://dx.doi.org/10.2118/17638-PA
- ↑ Hein Jr., N.W. 1996. Буровые насосные операции: решение проблем и технический прогресс. J Pet Technol 48 (4): 330-336. SPE-36163-MS. http://dx.doi.org/10.2118/36163-MS
- ↑ Маккой, Дж., Подио, А.Л., Хаддлстон, К. и другие. 1985. Акустические статические забойные давления. Представлено на симпозиуме SPE по производственным операциям, Оклахома-Сити, Оклахома, 10-12 марта 1985 г. SPE-13810-MS. http://dx.doi.org/10.2118/13810-MS
- ↑ 18,0 18,1 Маккой, Дж. Н., Подио, А. Л., и Беккер, Д. 1992. Сбор и анализ цифровых данных о переходных режимах давления на основе акустико-эхометрических исследований в насосных скважинах. Представлено на конференции по добыче нефти и газа пермского бассейна, Мидленд, Техас, 18-20 марта 1992 г.SPE-23980-MS. http://dx.doi.org/10.2118/23980-MS
- ↑ Watson, J. 1983. Сравнение различных геометрических характеристик насосных агрегатов классов I и III. Документ 030, представленный на Кратком курсе Southwestern Petroleum в 1983 г., Лаббок, Техас, 27–28 апреля.
- ↑ Evans, CE 1961. Какой тип балочной насосной установки вы бы использовали? Документ 015, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе 1961 года, Лаббок, Техас, 20–21 апреля.
- ↑ Keiner, C.J. 1962. Насосные агрегаты API. Документ 024, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе 1962 года, Лаббок, Техас, 12–13 апреля.
- ↑ Килгор, Дж.Дж., Трипп, Х.А., и Хант-младший, К.Л. 1991. Измерения эффективности системы насосной установки с шагающей балкой. Представлено на Ежегодной технической конференции и выставке SPE, Даллас, Техас, 6-9 октября 1991 г. SPE-22788-MS. http://dx.doi.org/10.2118/22788-MS.
- ↑ Берд, Дж. П. и Джексон, Британская Колумбия. 1962. Полевые испытания фронтальной механической нефтепромысловой насосной установки. Представлено на Совместном региональном совещании Скалистых гор, Биллингс, Монтана, SPE-382-MS. http://dx.doi.org/10.2118/382-МС
- ↑ Берд, Дж. 1968. Перекачивание большого объема с помощью насосных штанг. J Pet Technol 20 (12): 1355–1360. SPE-2104-PA. http://dx.doi.org/10.2118/2104-PA
- ↑ Нолен, К.Б. 1969. Глубокая штанговая перекачка большого объема. Представлено на осеннем собрании Общества инженеров-нефтяников AIME, Денвер, Колорадо, 28 сентября — 1 октября. SPE-2633-MS. http://dx.doi.org/10.2118/2633-MS
- ↑ Гипсон, Ф.В. 1990. Максимальная мощность балочного насосного оборудования и высокопрочных стальных насосных штанг.Документ 026, представленный на кратком курсе Southwestern Petroleum Short Course 1990 г., Лаббок, Техас, 18–19 апреля.
- ↑ Голт Р.Х. 1961. Геометрия насосного агрегата. Документ 002, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе 1961 года, Лаббок, Техас, 20–21 апреля.
- ↑ 28,0 28,1 Берд, Дж. П. 1970. Эффективность системы рычагов специального класса III, применяемой для насосных штанг. Документ 009, представленный на кратком курсе Southwestern Petroleum Short Course 1970 г., Лаббок, Техас, 16–17 апреля.
- ↑ Ричардс, К. 1956. Применение насосных агрегатов воздушного баланса. Документ 019, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе 1956 года, Лаббок, Техас, 15–16 апреля.
- ↑ Берд, Дж. П. 1990. История, предыстория и обоснование насосной установки балочного типа для нефтяных месторождений Mark II. Документ 024, представленный на кратком курсе Southwestern Petroleum Short Course 1990 г., Лаббок, Техас, 18–19 апреля.
- ↑ Берд, Дж. П. 1962. Последние достижения в конструкциях блоков балочного типа. Документ 001, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе 1962 года, Лаббок, Техас, 12–13 апреля.
- ↑ Слотер, Э. мл. 1962. Проблемы выбора и применения насосного агрегата. Документ 001, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе 1962 года, Лаббок, Техас, 19–20 апреля.
- ↑ Берд, Дж. П. 1989. Оценка эффективности режимов откачки балки и насосной штанги. Документ 021, представленный на кратком курсе Southwestern Petroleum 1989 г., Лаббок, Техас, 19–20 апреля.
- ↑ Lekia, S.D.L. и Дэй, Дж. Дж. 1988. Усовершенствованная методика оценки эксплуатационных характеристик и оптимального выбора систем насосных скважин с насосными штангами.Представлено на Восточном региональном собрании SPE, Чарльстон, Западная Вирджиния, 1-4 ноября 1988 г. SPE-18548-MS. http://dx.doi.org/10.2118/18548-MS
- ↑ Джуч, А.Х. и Уотсон, Р.Дж. 1969. Новые концепции в конструкции штанговых насосов. J Pet Technol 21 (3): 342-354. SPE-2172-PA. http://dx.doi.org/10.2118/2172-PA
- ↑ Lietzow, C.H. 1956. Гидравлический насосный агрегат с длинным ходом. Документ 008, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе 1956 года, Лаббок, Техас, 15–16 апреля.
- ↑ Джой, Р.F. 1969. Гибкая насосная нить. Документ 011, представленный на Кратком курсе Southwestern Petroleum в 1969 г., Лаббок, Техас, 17–18 апреля.
- ↑ Lietzow, C.H. Гидравлический насос — новые разработки. Документ 035, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе 1957 года, Лаббок, Техас, 17–18 апреля.
- ↑ Меттерс, Э.В. 1970. Новая концепция в технологии насосных агрегатов. Представлено на симпозиуме SPE Hobbs Petroleum Technology Symposium, Хоббс, Нью-Мексико, SPE-3193-MS. http://dx.doi.org/10.2118/3193-MS
- ↑ Юинг, Р.Д. 1970. Длинноходовая насосная установка. Представлено на региональном собрании SPE в Калифорнии, Санта-Барбара, Калифорния, SPE-3186-MS. http://dx.doi.org/10.2118/3186-MS
- ↑ Никелл, Р.Л. 1973. Обезвоживание газовых скважин с помощью пневматического насосного оборудования. Документ 18, представленный на Кратком курсе Southwestern Petroleum в 1973 г., Лаббок, Техас, 26–27 апреля.
- ↑ Смит, Л.А. 1975. Насосная штанга с помощью пневматических наземных агрегатов. Документ 033, представленный на Кратком курсе Southwestern Petroleum в 1975 г., Лаббок, Техас, 17–18 апреля.
- ↑ Brinlee, L.D. 1979. Опыт эксплуатации насосной установки Alpha I: новая альтернатива искусственному лифту. Представлено на Ежегодной технической конференции и выставке SPE, Лас-Вегас, Невада, 23-26 сентября 1979 г. SPE-8240-MS. http://dx.doi.org/10.2118/8240-MS
- ↑ Холленбек А.Л. 1980. Альтернативный подход к большому объему, длинный ходовой насос. Представлено на Ежегодной технической конференции и выставке SPE, Даллас, Техас, 21-24 сентября 1980 г. SPE-9216-MS. http: // dx.doi.org/10.2118/9216-MS
- ↑ Джесперсон, П.Дж., Лэйдлоу, Р.Н., и Скотт, Р.Дж. 1981. Насосный агрегат HEP (гидравлический, электронный, пневматический): рабочие характеристики, возможные применения и результаты полевых испытаний. Представлено на Ежегодной технической конференции и выставке SPE, Сан-Антонио, Техас, 4-7 октября 1981 г. SPE-10250-MS. http://dx.doi.org/10.2118/10250-MS
- ↑ Mourlevat, J.J. и Морроу, Т. 1982. Недавно разработанная длинноходная насосная установка обладает новой гибкостью для широкого спектра применений.Представлено на симпозиуме SPE по производственным технологиям, Хоббс, Нью-Мексико, 8-9 ноября 1982 года. SPE-11338-MS. http://dx.doi.org/10.2118/11338-MS
- ↑ Тарт, H.C. 1983. Опыт эксплуатации и эксплуатации с компьютерно-управляемыми насосными системами с длинным ходом штока. Документ 29, представленный на Кратком курсе Southwestern Petroleum в 1983 г., Лаббок, Техас, 27–28 апреля.
- ↑ Пикфорд, К. и Моррис, Б.Дж. 1989. Гидравлические штанговые насосные агрегаты в морских системах искусственного подъема. SPE Prod Eng 4 (2): 131-134.SPE-16922-PA. http://dx.doi.org/10.2118/16922-PA
- ↑ Hicks, A.W. и Джексон, А. 1991. Усовершенствованная конструкция насосных агрегатов с медленным длинным ходом. Документ 22, представленный на кратком курсе Southwestern Petroleum Short Course 1991 г., Лаббок, Техас, 17–18 апреля.
- ↑ Адэр, Р.Л. и Диллингем, округ Колумбия, 1995. Насосная система со сверхдлинным ходом хода снижает механические поломки, снижает стоимость подъема при одновременном увеличении добычи. Документ 001, представленный на Кратком курсе Southwestern Petroleum в 1995 г., Лаббок, Техас, 14–15 апреля.
- ↑ Zhou, Z., Hu, C., Song, K. et al. 2000. Гидравлические насосные агрегаты для морской платформы. Представлено на Азиатско-Тихоокеанской конференции и выставке нефти и газа SPE, Брисбен, Австралия, 16-18 октября 2000 г. SPE-64507-MS. http://dx.doi.org/10.2118/64507-MS
- ↑ Макканнелл, Д. и Холден, Д. 2001. Насосные системы с длинным ходом поршня в глубоких скважинах — полевые исследования. Представлено на Западном региональном собрании SPE, Бейкерсфилд, Калифорния, 26–30 марта. SPE-68791-MS. http: //dx.doi.org / 10.2118 / 68791-MS.
- ↑ Маккой, Дж. Н., Подио, А. Л., и Роулан, Л. 2001. Эффективность и балансировка Rotaflex. Представлено на симпозиуме SPE по производству и эксплуатации, Оклахома-Сити, Оклахома, 24–27 марта. SPE-67275-MS. http://dx.doi.org/10.2118/67275-MS.
- ↑ Leitzow, C.H. 1984. Уход и обслуживание длинноходных гидравлических насосных агрегатов. Документ 020, представленный на Кратком курсе Southwestern Petroleum в 1984 г., Лаббок, Техас, 24–26 апреля.
- ↑ McLane, C. Jr. 1954. Эксплуатация, уход и техническое обслуживание насосных агрегатов.Документ 010, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе в 1954 г., Лаббок, Техас, 13–14 апреля.
- ↑ Ричардс, К. 1955. Техническое обслуживание насосных агрегатов балочного типа. Документ 020, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе 1955 года, Лаббок, Техас, 14–15 апреля.
- ↑ Амерман Дж. 1952 г. Фундамент и установка насосных агрегатов балочного типа. Документ 032, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе 1952 года, Лаббок, Техас, 13–14 апреля.
- ↑ Ван Сант, Р.W. Jr. 1954. Смазка насосного агрегата. Документ 018, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе в 1954 г., Лаббок, Техас, 13–14 апреля.
- ↑ Пикенс, Дж. 1957. Эксплуатация, уход и техническое обслуживание балочных насосных агрегатов. Документ 013, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе 1957 года, Лаббок, Техас, 11–12 апреля.
- ↑ Амерман Дж. 1958. Причины и последствия неисправностей редуктора насосного агрегата. Документ 006, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе 1958 года, Лаббок, Техас, 17–18 апреля.
- ↑ Гриффин Ф. 1959. Установка и обслуживание насосных агрегатов. Документ 24, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе в 1959 г., Лаббок, Техас, 23–24 апреля.
- ↑ Эллиот, Б. 1962. Последствия неправильного использования и неправильного использования шестерен насосных агрегатов. Документ 02, представленный на Ежегодном краткосрочном курсе по подъему нефти в Западном Техасе 1962 года, Лаббок, Техас, 12–13 апреля.
- ↑ Bullard, B.D. 1976. Профилактическое обслуживание балочного насосного оборудования. Документ 32, представленный на Кратком курсе Southwestern Petroleum в 1976 г., Лаббок, Техас, 22–23 апреля.
- ↑ Griffin, F.D. 1977. Техническое обслуживание насосных агрегатов. Документ 022, представленный на Кратком курсе Southwestern Petroleum в 1977 г., Лаббок, Техас, 21–22 апреля.
- ↑ Miceli, L.D. и Хафф, М. Д. 1988. Профилактическое обслуживание насосной установки. Документ 024, представленный на кратком курсе Southwestern Petroleum Short Course 1988 г., Лаббок, Техас, 20–21 апреля.
- ↑ API RP 11G, Рекомендуемые методы установки и смазки насосных агрегатов, четвертое издание. 1994. Вашингтон, округ Колумбия: API.
- ↑ API RP 11ER, Рекомендуемые методы охраны насосных агрегатов, второе издание.1990. Вашингтон, округ Колумбия: API.
Интересные статьи в OnePetro
Такач, Г.- Чокши, Р .: «Расчет крутящих моментов редуктора насосных агрегатов Rotaflex с учетом упругости грузового ремня». Документ SPE 152229, представленный на конференции нефтегазовых инженеров стран Латинской Америки и Карибского бассейна, проходившей в Мехико 16-18 апреля 2012 г.
Такач, Г .: «Точный кинематический и крутильный анализ насосных агрегатов Rotaflex». Журнал нефтегазовой науки и техники. 115C (2014), стр.11-16 DOI 10.1016 / j.petrol.2014.02.008.
Голт, Р. Х., 1960. «Диаграммы допустимых нагрузок для насосных агрегатов». Proc. 7-й ежегодный краткий курс по подъему нефти в Западном Техасе, Лаббок. Техас, стр.67–71.
Лейн, Р. Э. — Коул, Д. Г. — Дженнингс, Дж. У .: «Технология производства: гармоническое движение полированного стержня». Статья SPE 19724, представленная на 64-й ежегодной технической конференции и выставке SPE, Сан-Антонио, Техас, 8-11 октября 1989 г.
Берд, Дж. П .: «История, предыстория и обоснование Mark II, балочного типа, насосной установки для нефтяных месторождений.»Proc. 37th Annual Southwestern Petroleum Short Course, 1990 272-91.
Beck, Th. — Петерсон, Р.: «Сравнение производительности линейного привода и насосных систем с шагающей балкой». Proc. 56-й Ежегодный краткий курс Southwestern Petroleum, 2009. 143–165.
Внешние ссылки
Используйте этот раздел, чтобы предоставить ссылки на соответствующие материалы на других веб-сайтах, кроме PetroWiki и OnePetro.
См. Также
Штанговый подъемник
PEH: Подъемная штанга насосная
Страница чемпионов
Джон Г.Свинос
Категория
Насосная установка— обзор
7.3.2.2 Другие кинематические параметры
Дополнительными кинематическими параметрами насосной установки Rotaflex являются скорость и ускорение каретки, которые по уже обсужденным причинам идентичны скорости и ускорению полированного стержень. Скорость каретки, в принципе, определяется с помощью , дифференцирующего положение каретки , CP , по времени и должна оцениваться по-разному в разных диапазонах углов звездочки, показанных на рис.7.8. Для этого необходимо знать изменение угла звездочки со временем. Поскольку редуктор агрегатов Rotaflex обычно вращается с постоянной скоростью вращения, средняя угловая скорость звездочки находится из диапазона углов звездочки θ макс и времени цикла откачки T . Следовательно, угол звездочки увеличивается со временем линейно, и, используя угловую частоту звездочки, мы получаем следующее выражение:
(7,7) θ = θmaxTt = Nθmax60t
где:
θ = угол звездочки, радианы ,
θ max = угол звездочки в конце хода вниз, радианы,
N = скорость откачки, 1 / мин,
t = время, с.
Используя эту формулу при дифференцировании функции положения каретки для первых двух диапазонов угла звездочки, показанных на рис. 7.8, мы находим скорость каретки следующим образом:
(7.8) v = dCPdt = RNθmax60sinθintherange1-2
(7.9) v = ⅆCPⅆtRNθmax60 в диапазоне2−3
где:
v = вертикальная скорость каретки, дюйм / с,
θ max = угол поворота звездочки на конце радиан,
N = скорость откачки, 1 / мин,
R = радиус звездочки, дюймы,
θ = угол звездочки, радианы.
Ускорение звездочки в сборе, которое идентично ускорению полированного штока, определяется путем дифференцирования скорости каретки во времени. Для двух диапазонов, проиллюстрированных ранее, мы получаем:
(7.10) a = ⅆvⅆt = (RNθmax60) 2cosθintherange1−2
(7.11) a = ⅆvⅆt = 0inherange2−3
где:
a a ускорение каретки, дюйм / с 2 ,
θ макс. = угол звездочки в конце хода вниз, радианы,
N = скорость откачки, 1 / мин,
R = радиус звездочки, дюймы,
θ = угол звездочки, радианы.
Коэффициент крутящего момента , TF , значения представляют крутящий момент, который должен использоваться в любом положении каретки для определения крутящего момента редуктора, действительного при данных условиях нагрузки; они облегчают расчет крутящих моментов коробки передач. Поскольку нагрузка на полированный стержень передается грузовым ремнем на весовую коробку, которая, в свою очередь, соединена с кареткой, расчет коэффициентов крутящего момента устройства Rotaflex основан на поведении цепной звездочки в сборе.По аналогии с традиционными штанговыми насосными агрегатами (см. , глава 3, ), коэффициенты крутящего момента определяются путем дифференцирования положения каретки по углу наклона звездочки. Альтернативное решение для расчета коэффициента крутящего момента представлено McCoy et al . [14]. Для двух образцов диапазона звездочек, использованных ранее, получены следующие формулы:
(7,12) TF = ⅆCPⅆθ = Rsinθв диапазоне1−2
(7,13) TF = ⅆCPⅆθ = Rintherange2−3
где:
TF = Коэффициент крутящего момента, дюймы,
R = радиус звездочки, дюймы,
θ = угол звездочки, радианы.
Точные формулы расчета положения каретки, скорости, ускорения и коэффициента крутящего момента содержатся в таблице 7.1 для пяти диапазонов углов звездочки, указанных на рис. 7.8.
Таблица 7.1. Кинематические параметры насосных агрегатов Rotaflex
| Для углов звездочки: 0 ≤ Θ ≤ π / 2 | |||
| Положение каретки, дюйм | R (1-cos θ ) | 75 Скорость каретки | дюйм / сRNθmax60sinθ |
| Коэффициент крутящего момента, дюйм | R sin θ | ||
| Ускорение каретки, дюйм / с 2 | 70 R|||
| Положение каретки, дюйм | R + R (θ − π2) | ||
| Скорость каретки, дюйм / с | RNθmax60 | ||
| Фактор крутящего момента дюйм | R | ||
| Ускорение каретки, дюйм / с 2 | 0 | ||
| Для углов звездочки: Θ макс. /2 — π / 2 & lt; Θ ≤ Θ max /2 + π / 2 | |||
| Положение каретки, дюйм | S − R + Rsin (θ − θmax2 + π2) | ||
| Скорость каретки, дюйм / с | RNθmax−60cos (θmax60cos (θ − θmax2 + π2) θmax2 + π2) | ||
| Фактор крутящего момента, дюйм | Rcos (θ − θmax2 + π2) | ||
| Ускорение каретки, дюйм / с 2 | −R (Nθmaxθ2 + π2max) | ||
| Для углов звездочки: Θ макс. /2 + π / 2 & lt; Θ ≤ Θ max — π / 2 | |||
| Положение каретки, дюйм | S − R − R (θ − θmax2 − π2) | ||
| Скорость каретки, дюйм / с | −RNθmax60 | — R | |
| Ускорение каретки, дюйм / с 2 | 0 | ||
| Для углов звездочки: Θ макс. — π / 2 & lt; Θ ≤ Θ макс. | |||
| Положение каретки, дюйм | R [1 − cos ( θ макс. — θ )] | ||
| Скорость каретки, дюйм / с (θmax − θ) | |||
| Фактор крутящего момента, дюйм | — R sin ( θ макс. — θ ) | ||
| Ускорение каретки, дюйм / с | |||
Определение переменных: R = радиус звездочки, дюйм; S = длина хода каретки, дюймы; N = скорость откачки, 1 / мин; Θ = угол звездочки, рад; Θ макс. = макс.угол звездочки, рад.
При использовании того же блока Rotaflex модели 1151 , что и раньше, значения скорости и ускорения для скорости откачки Н = 2 SPM приведены на Рис. 7.10 и Рис. 7.11. Профиль скорости характеризуется постоянной скоростью во время большей части хода вверх и вниз; меняется только направление движения. Опять же, наблюдается симметричная работа, и блок ведет себя идентично при движении в противоположных направлениях.
Рисунок 7.10. Скорость каретки в зависимости от времени для установки Rotaflex модели 1151, работающей со скоростью 2 SPM.
Рисунок 7.11. Ускорение каретки в зависимости от времени для установки Rotaflex модели 1151, работающей со скоростью 2 SPM.
Длительное бесшумное движение каретки приводит к нулевому ускорению на протяжении большей части цикла откачки. Вокруг двух крайних точек хода есть довольно низкие уровни ускорения, и они продолжаются только в течение коротких периодов времени. Ускорение каретки в сборе происходит только за два поворота звездочки на 180 °; это кажется незначительным по сравнению с полным поворотом звездочки в 2435 °, допустимым для данного устройства.
В заключение отметим, что установка Rotaflex работает очень тихо, работает с очень низким ускорением и незначительными динамическими эффектами, и предлагает кинематическое поведение, которое очень сильно отличается от любого другого блока накачки пучка. Полированный шток традиционных насосных агрегатов балки непрерывно ускоряется-замедляется во время хода вверх и вниз, вызывая различные скорости; эти агрегаты, в отличие от агрегатов Rotaflex, испытывают высокие динамические нагрузки.
Коэффициенты крутящего момента для того же блока Model 1151 Rotaflex, что и раньше, представлены на рис.7.12 как функция времени. Как видно, за исключением двух коротких периодов около двух крайних значений хода, коэффициенты крутящего момента равны постоянным ; только их знак различен для хода вверх и вниз.
Рисунок 7.12. Значения коэффициента крутящего момента в зависимости от времени для устройства Rotaflex модели 1151.
Пример 7.1Найдите кинематические параметры блока Rotaflex при угле звездочки θ = 22,689 радиан (1300 °). Основные данные агрегата представлены как
| Скорость откачки = 2 SPM | Длина цепи = 780.4 дюйма |
| Длина хода каретки = 369,2 дюйма | Радиус звездочки = 18,36 дюйма |
Решение
Сначала найдите угол звездочки, относящийся к нижней части хода вниз по формуле. (7.1):
θmax = 780,4 / 18,36 = 42,5рад (2435 °).
Так как 42,5 / 2 — π /2 <22,689 <42,5 / 2 + π /2, уравнение. (7,4):
CP = 369,2-18,36 + 18,36sin [22,689-42,5 / 2 + π / 2] = 350,84 + 18,36sin (3,009) = 353,25 дюйма.
Формула скорости взята из таблицы 7.1 следующим образом:
v = RNθmax60cos [θ − θmax / 2 + π / 2] = 18,36 × 2 × 42,560cos [3,009] = — 25,8 дюйма / с = −2,15 фут / с.
Ускорение находится по формуле, приведенной в таблице 7.1:
a = −R (Nθmax / 60) 2sin [θ − θmax / 2 + 90] = — 18,36 (2 × 42,5 / 60) 2sin [3,009] = −4,84 дюйма / с2 = −0,40 фут / с2.
Наконец, коэффициент крутящего момента рассчитывается по соответствующей формуле в Таблице 7.1:
TF = 18,36cos (3,009) = — 18,2 дюйма.
Штанговая насосная система — обзор
5.7 Динамика трения насосных штанг
Штанговые насосные системы являются старейшим и наиболее широко используемым типом искусственных подъемных систем для нефтяных скважин.На рис. 5.13 показана схема системы штангового насоса. Штанговая насосная насосная станция — наиболее широко используемый метод искусственного подъема нефтяных скважин на суше. Колонны насосных штанг передают движение от приводной машины на устье скважины к скважинному масляному насосу.
Рисунок 5.13. Схема упрощенной системы всасывающих насосов
Диагностика насосов обычно проводится путем интерпретации графика динамометра насоса (карты насоса), который представляет собой график рассчитанных нагрузок в различных положениях хода насоса.В наклонно-направленных скважинах механическое трение становится незначительным, поскольку существует значительный контакт между штангами, направляющими штанг и НКТ. Следовательно, динамическое поведение колонны штанг отличается для наклонно-направленных и вертикальных скважин.
Правильное моделирование контактного трения и правильный учет контактного трения в расчетах важны для решения задач диагностики наклонно-направленных скважин. Кроме того, поскольку скважины наклонены, некоторые секции колонны штанг могут быть изогнуты между двумя муфтами в середине поворота изогнутого участка, что вводит понятие кривизны колонны штанг.Важно уловить поведение продольных волн напряжения, а также волн поперечных напряжений стержневого элемента, понимая динамику штанги-жидкости-трубчатой штанги насосных систем со штангой, участвующих в трении.
Для оптимизации добычи нефти важно получить динамометрический график насоса, который может точно отображать условия работы насоса. Условия насоса, такие как утечка плунжера или клапана, изношенный или раздвоенный цилиндр, газовая интерференция, изогнутый цилиндр, заедание насоса, удары насоса, движение насосно-компрессорных труб и забивание жидкости, могут быть эффективно определены с помощью карт насосов.Насос также можно замедлить или выключить, если форма карты насоса указывает на неполное заполнение насоса. Прямое измерение скважинных эксплуатационных данных не применимо в большинстве случаев, поскольку скважинные условия делают размещение оборудования для измерения положения или нагрузки на насосе дорогостоящим и трудным. Следовательно, подход к созданию соответствующей, достаточно точной математической модели для насосных систем со штангой и оценке скважинного динамометра на основе измеренного смещения полированной штанги и нагрузки все больше привлекает внимание экспертов как в промышленности, так и в научных кругах.
Типичная трехмерная (3D) траектория ствола скважины для S-образных скважин показана на Рисунке 5.14. Для этого типа скважины угол наклона, описывающий геометрию ствола скважины, изменяется линейно от 0 в верхней части ствола скважины до десятков градусов на определенной глубине. Углы остаются постоянными на большей глубине, а затем линейно уменьшаются до 0 на максимальной глубине. Интересно, что несколько существующих исследовательских алгоритмов для диагностики скважин с S-образным изгибом в Северной Америке породили обычное явление, заключающееся в том, что насос в точках времени перехода с прерывистым ходом испытывает чрезмерную нагрузку или люфт вытеснения.Этот вид низкоскоростного нестационарного движения, характеризующийся остановкой-проскальзыванием или остановкой-реверсированием смещения и чрезмерной силой, классифицируется как прерывистого скольжения. В [100] рассматриваются связанные продольные и поперечные движения, классическая модель кулоновского трения и метод конечных элементов. Результаты моделирования показывают чрезмерную нагрузку насоса и колебания рабочего объема насоса в конце хода вверх. В [101–102] метод конечных разностей и классическое кулоновское трение, генерируемое из трехмерных траекторий ствола скважины, используются для решения нелинейного волнового уравнения для наклонно-направленных скважин.В [102] конец хода вверх демонстрирует чрезмерную нагрузку насоса. Нагрузка насоса увеличивается по мере увеличения кулоновского трения. Плавные проскальзывания происходят как в конце хода вверх, так и в конце хода вниз. Прерывистое скольжение сильнее в конце хода вверх, чем в конце хода вниз.
Рисунок 5.14. 3D траектория штанги
Требуется чрезвычайно дорогостоящий ремонт для ремонта поврежденных насосных систем со штангой. Расчеты, учитывающие больше факторов, связанных с реальными системами, могут обеспечить лучшую диагностику и контроль насосных систем со штангой.Было проведено множество исследований для построения рассчитанных вручную или компьютерных моделей, которые могут воспроизвести динамическое поведение насосных систем со штангой [100–115]. В 1990-х годах [100,102] исследовали динамику насосных штанговых насосных систем для наклонно-направленных скважин, принимая во внимание эффекты контакта, трения и воздействия жидкости. [104–105] предложили двухмерные (2D) и трехмерные модели для стержневых, насосно-компрессорных и жидкостных систем. [107] расширил модель для наклонно-направленных скважин, совместив продольные и поперечные колебания с трением на границе раздела между штангой и НКТ; [106] предложили трубчатую динамику стержня-жидкость-насосно-компрессорные трубы и точно выявили эффекты вязкого демпфирования; [108] использовали сокращенную модель сосредоточенной системы и упростили анализ; и [109] использовали ряд Фурье для решения волнового уравнения в полубесконечной области и использовали измеренное положение поверхности и нагрузку в качестве двух необходимых граничных условий для моделирования колонны штанг конечной длины.Однако, ограниченный линейными системами или слабыми нелинейными системами, метод рядов Фурье не может точно описать точку разрыва волны и может вызвать колебания. [113] изучали динамическое прерывистое скольжение насосных систем со штангой с помощью вариационного неравенства и многозначных соотношений сила-скорость, а [114–115] исследовали идентификацию параметров системы, используя проверенные результаты. Их подход, казалось, был в состоянии определить момент времени перехода каждого узла вдоль колонны штанг и, таким образом, получить надежные прогнозы.
В этих документах не было дано никаких объяснений или анализа того, почему и как возникают эти скачки. На самом деле нефтедобывающие компании расстраиваются, когда видят эти скачки, поскольку эти явления очень похожи на колебания движения, возникающие, когда плунжер случайно выходит за пределы допустимого диапазона и ударяется о верхнюю и нижнюю конструкции насоса. Поэтому контроллеры для диагностических и управляющих целей, основанные на этих алгоритмах для наклонно-направленных скважин, не могут быть приняты отечественными или зарубежными нефтедобывающими компаниями.На самом деле таких проскальзываний может и не быть. Они могут быть вызваны недостаточными моделями стержня / трения или недостаточными вычислительными методами.
Требуется полное понимание этих явлений прилипания-проскальзывания и динамики наклонно-направленных скважин. Диагностика неисправностей насосной штанговой насосной системы — важный предмет исследований нефтедобывающей техники. Форма графика отражает фактические условия закачки, поэтому различные формы динамометрических карт представляют разные скважинные условия.
На рисунке 5.15 ρ, E — массовая плотность и модуль упругости стержня соответственно; Ar — площадь поперечного сечения стержня.
Рисунок 5.15. Схема сил, действующих на бесконечно малый стержневой элемент
Рисунок 5.16. График измеренного и смоделированного поверхностного динамометра (пунктирная линия: измеренная; сплошная линия: модель трения I; пунктирная линия: модель трения II)
Взяв бесконечно малый стержневой элемент, как показано на рисунке 5.15, который иллюстрирует осевые силы, силу вязкости, силу трения , а начальная сила вязкая сила жидкости
[5.25] FrL = ve (∂u∂t) Δs,
, где ve — коэффициент вязкого сопротивления на единицу длины. Контактное усилие между трубкой и стержнем составляет
[5.26] N = [P∂θ∂s − qr′sinθ] 2+ (P∂ϕ∂ssinθ) 2,
где Δs — сегмент стержня, θ — наклон угол, φ — азимутальный угол, а P — эквивалентная осевая сила. Если коэффициент трения равен μ, сила трения скольжения на единицу длины на Δs составляет
[5.27] Frt = μΔsN,
, где μ — коэффициент трения. qr ′ = (ρ − ρL) Ag, ρL — массовая плотность жидкости.
Следуя принципу Даламбера, можно вывести уравнение движения:
[5.28] ∂2u∂t2 = (E / ρ) ∂2u∂s2− (ve / ρA) ∂u∂t − μN / ρA + (ρL − ρ) g / ρ.
Это нелинейное уравнение в частных производных. Путем включения начальных и граничных условий уравнение. [5.28] может быть решено, что приводит к замкнутой кривой зависимости нагрузки на подвешенном конце штока от смещения хода. Преобладающими эффектами являются коэффициенты вязкого демпфирования и коэффициенты трения. Форма и углы кривой меняются в зависимости от используемой модели трения.
Для описания нелинейных характеристик трения насосной системы со штангой может использоваться определенная усовершенствованная модель трения, такая как модель трения LuGre. На рис. 5.16 показаны измеренные и смоделированные графики поверхностного динамометра.
Принципиальная схема насосной системы штангового насоса (Голан, 1991).
Контекст 1
… исследования очень приветствуются, поэтому стремление к созданию стольких институтов нефтяных исследований в этих странах, особенно в Камеруне.Лабораторное оборудование, необходимое для работы таких учреждений, часто очень дорогое и недоступно для некоторых из этих развивающихся учреждений. Поэтому крайне важно, чтобы при поиске средств для оснащения этих лабораторий были разработаны практические модели, чтобы помочь в обучении некоторым аспектам нефтегазовой промышленности. Было опубликовано множество книг, технических статей и отраслевых стандартов по методу подъема насосных штанг и связанной с ним технологии (Economides et al., 1994; Guo et al., 2007; Голаны, 1991). Эта работа направлена на разработку практической модели штангового насосного агрегата с использованием очень простых материалов для представления реальных компонентов месторождения. Это поможет лучше понять, как такие системы работают в полевых условиях, а также вдохновит студентов на применение базовых знаний, полученных в классе, для размышления, создания, создания и внедрения инновационных моделей в нефтяном секторе. Система насосных штанговых насосов — один из старейших и наиболее широко используемых методов добычи нефтяных скважин.Это насосная система с искусственным подъемом, в которой для приведения в действие скважинного насосного агрегата используется поверхностный источник энергии. Штанговые насосные агрегаты относятся к группе поршневых или поршневых насосов. Штанговая насосная система состоит из нескольких компонентов, некоторые из которых работают над землей, а другие — внутри скважины, как показано на Рисунке 1 (Clegg, 2006; Takacs, 2003). Наземный насосный агрегат, который приводит в действие подземный насос, состоит из первичного двигателя (обычно электродвигателя) и, как правило, балки, прикрепленной к поворотной стойке.Столб называется столбом Сампсона, а балку обычно называют шагающей балкой. Узел балки и кривошипа создает возвратно-поступательное движение в колонне насосных штанг, которая соединяется со скважиной …
Расчет компонентов крутящего момента редуктора на насосных станциях с использованием данных динамометрической карты
Пример задачи
As Как уже говорилось, инерционные моменты на редукторе зависят от угловых ускорений различных компонентов насосной установки. Поскольку определение угловых ускорений кривошипа и балки по зависимости угла поворота кривошипа от времени, θ ( t ), требует нескольких соображений, решения, применяемые в этой статье, будут проиллюстрированы на примере задачи.Пробоотборная скважина добывается с помощью 1,5-дюймовой насосной установки на высоте 8000 футов с использованием колонны штанг с двумя конусами по API 76. Наземный насосный агрегат представляет собой обычный агрегат C-640D-365-168, работающий по часовой стрелке со средней скоростью откачки 5,98 об / мин при длине хода полированного штока 168 дюймов. Размеры рычажного механизма насосного агрегата (показаны на рис. ) приведены здесь:
Рис. 2Размеры рычажного механизма традиционной насосной установки
| A (дюйм.) | 210.00 | K (дюймы) | 192,87 | I (дюйм) | 120,00 |
| C (дюйм.) | 120,03 | P (дюймы) | 148,50 | R (дюйм) | 47,00 |
Динамометрическая съемка содержала 302 пары полированной стержневой нагрузки, F ( т ) и положение, с ( т ), данные, измеренные как функция времени с помощью электронного динамометра; динамометрическая карта, построенная на основе этих данных, представлена на рис.3.
Рис. 3Плата динамометра для примера задачи
Угловое ускорение кривошипа
Во-первых, зависимость угла поворота кривошипа от времени, θ ( t ), выводится из данных динамометрической съемки с использованием процедуры расчета, описанной ранее. Если бы кривошип насосной установки вращался с постоянной скоростью, углы поворота кривошипа в зависимости от времени падали бы на прямую линию. Однако в примере это не так, как показано на рис.4 и обозначается отклонением угла поворота коленчатого вала в зависимости от времени, θ ( t ), от идеальной прямой линии. Это вызвано изменяющейся скоростью откачки во время цикла откачки.
Рис. 4Расчетные углы поворота коленвала, скорости и ускорения для примера
Угловая скорость кривошипа, d θ / d t , является производной этой функции и определяется с помощью модели численного дифференцирования с использованием пятишагового шаблона, как указано здесь
$$ \ frac {{{\ текст {d}} \ theta}} {{{\ text {d}} t}} \, \; \ приблизительно \; \ frac {{- \ theta \ left ({t \; + \; 2 \, \ Delta t} \ right) \; + \; 8 \, \, \ theta \ left ({t \; + \, \ Delta t} \ right) \; — \; 8 \, \, \ theta \ left ({t \; — \; \ Delta t} \ right) \; + \; \ theta \ left ({t \; — \; 2 \, \ Delta t} \ right) \; \;}} {12 \; \ Delta t}.$$
(11)
Для применения этой модели требуются две дополнительные точки (углы поворота коленчатого вала) на каждом конце цикла откачки; они оцениваются путем прямолинейной экстраполяции исходных данных. Это решение гарантирует, что производная функция не будет иметь необычных пиков на двух концах цикла; Точность расчета обеспечивается малым шагом по времени. Как показано на рис. 4, численное дифференцирование приводит к плавной кривой угловой скорости кривошипа.Поскольку она является периодической функцией во времени, ее можно описать кривой усеченным рядом Фурье, который легко дифференцировать, чтобы получить угловое ускорение коленчатого вала, d 2 θ / d t 2 . Полные результаты расчетной модели, разработанной в этой статье для примера, показаны на рис. 4, на котором показаны изменения угловой скорости и ускорения кривошипа со временем, которые будут использоваться в последующих расчетах.
Расчет углового ускорения балки
Кинематическая модель Свиноса
Диаграмма углового ускорения шагающей балки может быть получена из кинематической модели насосной установки, как было предложено Свиносом 1983.{2}}}}} {{\ frac {{{\ text {d}} \ theta_ {2}}} {{{\ text {d}} t}}}} \; — \; \ left ({\ frac {{{\ text {d}} \ theta_ {3}}} {{{\ text {d}} t}} \; — \; \ frac {{{\ text { d}} \ theta _ {\ text {b}}}} {{{\ text {d}} t}}} \ right) \; \ cot \ left ({\ theta_ {3} \; — \; \ theta_ {\ text {b}}} \ right) \; + \; \ left ({\ frac {{{\ text {d}} \ theta_ {2}}} {{{\ text {d}} t}} \; — \; \ frac {{{\ text { d}} \ theta_ {3}}} {{{\ text {d}} t}}} \ right) \; \ cot \ left ({\ theta_ {2} \; — \; \ theta_ {3}} \ right)} \ right]. $$
(12)
Формула позволяет рассчитать ускорения балки для общего случая, когда кривошип насосной установки не вращается с постоянной угловой скоростью, т.е.е., угловое ускорение кривошипа, d 2 θ 2 / д т 2 , не равно нулю. Как видно, расчет требует знания характеристик скорости и ускорения кривошипа, то есть d θ 2 / d t и d 2 θ 2 / д т 2 функций.Они должны быть определены заранее, предпочтительно с использованием итерационной процедуры, представленной в этой статье.
Использование только что описанной процедуры Свиноса громоздко по нескольким причинам. Некоторые дополнительные углы и их производные по времени также необходимы для определения ускорения пучка; их формулы, основанные на размерах рычажных механизмов насосной установки, даны Свиносом 1983 г., здесь не воспроизводятся. Использование итерационной процедуры для определения кинематических параметров кривошипа усложняет решение и делает выполнение простой процедуры довольно сложной для выполнения.
Предложение Гиббса
Гиббс 2012 представил более прямую модель расчета, основанную на уравнении. 13, который выражает положение полированного стержня с угловым положением центральной линии балки. Формула выражает тот факт, что вертикальное смещение несущей балки (и полированного стержня) равно длине дуги, охватываемой внешним концом рычажного механизма A насосного агрегата для данного угла луча, θ b , см. Рис.{2}}} \, s \ left (t \ right). $$
(14)
Эта формула позволяет напрямую вычислить угловое ускорение луча, d 2 θ б / д т 2 , по дифференциации положения полированного стержня — временные данные, с ( t ), полученные из динамометрической съемки. Самый простой способ дифференцировать эту функцию — сначала сопоставить ряд измеренных данных, s ( t ), усеченным рядом Фурье, а затем найти вторую производную от него.Из-за относительно плавного изменения положения полированного стержня со временем Гиббс (2012) рекомендует максимум десять членов в ряду Фурье.
Простая числовая модель
Простая численная модель, часто используемая для расчета кинематических параметров насосных агрегатов (Echometer 2007), также основана на уравнении. 14. Ускорение луча определяется из ускорения полированного стержня, представленного термином d 2 с / d t 2 в формуле.Ускорение полированного стержня, в свою очередь, рассчитывается из значений положения полированного стержня в зависимости от времени, с ( t ), измеренных во время динамометрической съемки. Численное дифференцирование функции s ( t ) по времени дает скорость полированного стержня, v ( t ), следующим образом:
$$ v \ left (i \ right) \; = \; \ гидроразрыва {{s \ left (i \ right) \; — \; s \ left ({i + 1} \ right)}} {{t \ left (i \ right) \; — \; t \ left ({i + 1} \ right)}}. $$
(15)
Ускорение полированного стержня, a ( t ), определяется аналогичным образом путем численного дифференцирования этой функции, и временная история результирующего ускорения обеспечивает требуемый d 2 s / d t 2 значений, которые будут использоваться в уравнении.14. Решение этого уравнения дает требуемые значения ускорения пучка, d 2 θ б / д т 2 .
Сравнение имеющихся моделей
На рисунке 5 показаны ускорения пучка, рассчитанные на основе Svinos и простой численной модели для примера. Ясно видно, что общая тенденция численной модели правильно следует за точными ускорениями, полученными из кинематической модели, но мгновенные значения сильно колеблются, что делает этот подход сомнительным и исключается из дальнейшего изучения.
Рис. 5Сравнение значений ускорения пучка, рассчитанных по методу Свиноса и численной модели для примера задачи
Результаты расчетов с использованием модели Gibbs представлены на рис. 6. На рисунке показано приближение Фурье (усеченное на десять членов) смещения полированного стержня, рассчитанное на основе функции с ( t ), измеренной во время динамометрический осмотр. Благодаря плавному характеру функции перемещения полированного стержня фитинг превосходен; Скорость и ускорение полированного стержня вычисляются из ряда Фурье путем аналитического дифференцирования.На рисунке также показаны изменения скорости полированного стержня d с / d t и ускорения пучка d 2 θ б / д т 2 , последний рассчитывается по формуле. 14. Сравнение фиг. 5 и 6 показывает, что ускорения пучка, вычисленные по моделям Svinos и Gibbs , дают идентичные результаты; Однако сложность и потребность в вычислениях этих двух подходов сильно различаются.Из-за ее простоты и низких требований к вычислениям рекомендуется расчетная модель Гиббса 2012.
Рис. 6Расчетные параметры модели Гиббса для примера задачи
Исследование механизма энергосбережения на балочно-насосном агрегате с гидравлическим приводом
Abstract
Стремясь решить проблемы длинной цепи передачи, большой инерции движения компонентов и высокого энергопотребления насосных агрегатов, предлагается новый насосный агрегат с прямой балансировкой и гидравлическим приводом.Посредством математического моделирования и анализа имитационного моделирования для сравнения динамических характеристик подвески и балансных характеристик насосной установки с гидравлическим приводом и традиционной. Получается, что максимальная скорость подвески падает на 21,14%, максимальное ускорение падает на 28,88%, а среднеквадратичный крутящий момент падает на 92,9% на подвеске насосного агрегата с гидравлическим приводом. Результаты экспериментов доказывают, что насосный агрегат с гидравлическим приводом имеет значительную эффективность энергосбережения и достигает более 30.9% от уровня энергосбережения. Теоретические и практические результаты исследований показывают, что насосная установка с гидравлическим приводом является надежной и более энергосберегающей, что составляет основу теории и инженерной практики в применении.
Образец цитирования: Ян Х., Ван Дж., Лю Х. (2021) Исследование энергосберегающего механизма на балочно-насосном агрегате с гидравлическим приводом. PLoS ONE 16 (4): e0249244. https://doi.org/10.1371/journal.pone.0249244
Редактор: Марко Лепиди, Университет Генуи, ИТАЛИЯ
Поступило: 30 октября 2020 г .; Принята к печати: 13 марта 2021 г .; Опубликовано: 1 апреля 2021 г.
Авторские права: © 2021 Yang et al.Это статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии указания автора и источника.
Доступность данных: Все соответствующие данные находятся в документе и его файлах с вспомогательной информацией.
Финансирование: Проект финансировался крупным проектом Департамента образования провинции Аньхой (№ KJ2018ZD045), Фондом PhD Startup Fund Университета Чао Ху (№KYQD-201709).
Конкурирующие интересы: Авторы заявили, что конкурирующих интересов не существует.
Введение
Обычная балочная насосная установка долговечна и надежна. Однако из-за четырехзвенной конструкции рычагов он имеет низкий КПД системы, высокое потребление энергии и плохую балансировку. Данные по добыче показывают, что потребление энергии системами искусственного подъема составляет 30% от общего потребления энергии на месторождении [1].По мере непрерывной разработки нефтяных месторождений емкость скважинного флюида постепенно уменьшается. Таким образом, увеличение количества насосных агрегатов или нефтяных скважин является эффективным способом увеличения добычи, что неизбежно потребует более высоких энергозатрат [2] и вызовет неприятное противоречие между эксплуатацией нефтяных скважин и потреблением энергии [3].
В целях дальнейшего снижения энергопотребления нефтяных скважин ученые всего мира провели обширные исследования в области энергосбережения механической конструкции и двигателя, таких как низкоскоростной синхронный двигатель с постоянными магнитами [4], двигатель с регулируемой скоростью. [5] и интеллектуальное управление [6] в обычных пучковых насосных установках.Du et al. [7] разработали систему автоматической регулировки баланса луча для усиления эффекта баланса, а Zhao et al. [8] предложили систему гидравлического баланса. Было изобретено большое количество других насосных агрегатов поздних моделей, обеспечивающих теоретическую и практическую поддержку устойчивого развития нефтяных месторождений.
В целом надежность и долговечность некоторых новых устройств искусственного подъема все еще хуже, чем у обычных насосных агрегатов. Таким образом, большинство исследований энергосберегающих технологий насосных агрегатов по-прежнему сосредоточено на механической конструкции или интеллектуальном управлении обычных насосных агрегатов, таких как привод с регулируемой скоростью и его механизм экономии, авторы Song et al.[9], баланс слежения за пучком во время работы Янга и др. [10], и маховик накопителя энергии Хан и др. [11]. Авторы этой статьи считают, что основными причинами высоких потерь энергии в обычных насосных агрегатах являются высокая инерция движущихся частей, большая пусковая мощность и плохая балансировка. Принятие соответствующих мер для уменьшения инерции движущихся частей и улучшения характеристик баланса является ключом к снижению потребления энергии.
В последние годы некоторые ученые глубоко изучили применение насосных агрегатов с приводом от гидравлической системы.Например, механико-гидравлический механизм передачи крутящего момента используется для реализации накопления и выпуска энергии через гидравлическую систему и доказал хороший эффект энергосбережения [12], метод динамической компенсации мощности принят для реализации самоадаптивной регулировки и более высокая точность скорости гидравлического насоса [13], отдельные типы гидравлического масла были выбраны для гидравлического насосного агрегата [14] и т. д. Очевидно, применение гидравлического привода в насосном агрегате имеет преимущества и, следовательно, хорошие перспективы применения.
В данной статье предлагается новый тип насосного агрегата прямой балансировки с гидравлическим приводом, устраняющий недостатки системы насосного агрегата балки, такие как низкий КПД трансмиссии, сложная регулировка хода и плохой эффект балансировки. Гидравлический цилиндр используется для непосредственного поворота балки, что снимает механизм передачи ремня, редуктора, четырехзвенного рычага и т.д. корпус балансира в коробке балансира.При этом на центральном валу балки насосного агрегата установлен угловой датчик для контроля угла поворота балки, который определяет реверс гидросистемы, а также смещение гидроцилиндра и ход перекачки. установка бесступенчатая.
С помощью вышеуказанных методов балочно-насосный агрегат с гидравлическим приводом может быть изготовлен или модифицирован из старого. Реализовано повышение эффективности системы насосного агрегата, плавная регулировка хода и удобная регулировка баланса; кроме того, это значительно снижает расход стали насосной установкой.Таким образом, можно сократить производственный цикл и снизить стоимость изготовления насосного агрегата. Результаты исследования будут способствовать устойчивому развитию нефтяных месторождений.
Динамический анализ насосного агрегата гидропривода
A. Модель кинетического анализа
Аналитическая модель движения подвески, крутящего момента балансира и контактного усилия на направляющей балки-качалки с гидравлическим приводом показана на рис. 1.
Рис. 1. Модель динамического анализа балочно-насосной установки с гидравлическим приводом.
На рис. 1, где: A — длина предплечья, мм; P — длина звена, мм; W т — балансир, кН; C F — сила контакта направляющего рельса, кН; P F — сила тяги кН; C — длина заднего рычага, C = C 1 + C 2 , C 1 — длина лески GH и C 2 — длина линии EG , мм; L p — длина лески EF , мм; θ 1 ~ θ 5 — вспомогательные углы для анализа его балансной характеристики, рад; θ 6 — постоянный угол луча к горизонтали на нижней точке матрицы, рад; θ 7 — постоянный угол наклона направляющей скольжения, рад.
https://doi.org/10.1371/journal.pone.0249244.g001
Для уменьшения динамической нагрузки (инерционной нагрузки и вибрационной нагрузки) подвески насосного агрегата принят обратный метод расчета для расчета по трапецеидальная кривая скорости подвеса. Во-первых, устанавливается скоростная кривая подвески насосного агрегата; затем получают кривую ускорения и кривую смещения; наконец-то определен закон движения гидроцилиндра.На основе описанного выше процесса может быть определена стратегия управления последующей гидравлической системой. Система и метод управления будут изучены в будущем.
Б. Гидравлический привод насосной установки модели
По сравнению с обычным насосным агрегатом балки трехмерные модели показаны на рисунках 2 и 3. Из рисунков 2 и 3 ясно видно, что корпус цилиндра, кривошип, противовес, ременная передача, тормозной механизм и другие промежуточные детали трансмиссии. на насосном агрегате снимаются, и добавляются балансирный груз коробки, скользящая направляющая, гидроцилиндр и другие компоненты.Возьмем, к примеру, CYJ10-3-37HB: после модификации насосный агрегат с гидроприводом может сэкономить до 10 тонн стали (кривошипный механизм 2,4 т, балансирный груз 4 тонны, редуктор 37H 4 тонны и т. Д.) Или более. Таким образом, по сравнению с обычным насосным агрегатом, насосный агрегат с гидравлическим приводом может сэкономить почти 50% материалов в целом.
C. Гидравлический принцип управления насосным агрегатом гидропривода
Принципиальная схема гидросистемы насосного агрегата с гидроприводом представлена на рис.Система состоит из масляного резервуара, электрического плунжерного насоса, манометра, перепускного клапана, индикатора перепада давления, фильтра высокого давления, радиатора, двухпозиционного четырехходового электромагнитного клапана, регулирующего клапана, гидроцилиндра и т.д. управляется периферийной электрической схемой управления, чтобы реализовать реверсивное действие гидроцилиндра и движение насосного агрегата вверх и вниз.
Рис. 4. Схема гидропривода.
1-Масляный поддон; 2-Электрический плунжерный насос; 3-манометр; 4-предохранительный клапан; 5-сигнал перепада давления; 6-фильтр высокого давления; 7-радиатор; 8-двухпозиционный четырехходовой электромагнитный клапан; 9-Регулирующий клапан; 10-Гидравлический цилиндр.
https://doi.org/10.1371/journal.pone.0249244.g004
Анализ динамического моделирования насосной установки
Конструктивные размеры и рабочие параметры насосной установки CYJ10-3-37HB, выбранной в качестве объекта, приведены в таблице 1.
Чтобы сравнить согласованность и сопоставимость двух результатов моделирования, расчет был проведен в условиях одной и той же скважины. Условия скважины показаны в Таблице 2.
Блок-схема процедур расчета решения показана на рис.
A. Анализ движения подвески
а. Анализ подвесного движения насосного агрегата гидропривода.
Как упоминалось выше, согласно закону движения подвески насосного агрегата с гидравлическим приводом кривая скорости показана на рис. 6. Уравнение скорости подвески выглядит следующим образом.
(1) куда:t 1 ~ t 6 — соответственно время работы сегмента на подвеске, с; V u 、 V d — соответственно представляют постоянную скорость хода вверх и вниз, мм / с.
Уравнение (1) может быть использовано для вывода уравнения решения для смещения и ускорения подвески на насосном агрегате следующим образом: (2) (3)
Решая уравнения (1) — (3), можно получить кривую движения подвески насосного агрегата с гидравлическим приводом, как показано на рис. 7.
г. Анализ движения точки подвеса традиционной насосной установки.
В процессе анализа движения подвески традиционной балочной насосной установки, комплексный векторный метод в основном используется для анализа и решения моделирования.Подробная математическая модель и процесс вывода можно найти в литературе [15]. В данной статье не проводится подробный анализ этого, а отображаются только результаты расчетов, как показано на рис. 8.
Сравнивая результаты анализа рисунков 7 и 8, можно обнаружить, что скорость и ускорение точки подвеса насосной установки сильно изменились. Максимальная скорость на точке подвеса обычной машины составляет 507,24 мм / с, а максимальная скорость насосного агрегата с гидравлическим приводом составляет 400 мм / с, что уменьшается на 21.14%. Максимальное ускорение обычного составляет 224,96 мм / с2, а максимальное ускорение насосного агрегата с гидравлическим приводом составляет 160 мм / с2, что снижает на 28,88%. Результаты показывают, что гидравлический привод будет лучше сдерживать динамическую нагрузку точки подвеса насосного агрегата (как инерционную, так и вибрационную). Эта часть анализа будет проанализирована и объяснена в Разделе B.
Б. Сравнительный анализ вибрационной нагрузки подвески
Для статической или динамической нагрузки подвески насосных агрегатов методы расчета одинаковы.Инерционная нагрузка связана с ускорением подвески, а вибрационная нагрузка связана со скоростью подвески в конце упругой деформации стержня и трубки. Предполагая, что конец трубы не закреплен, для анализа вибрационной нагрузки используется классическая теория одномерного волнового уравнения [16]. Учитывается продольная вибрация колонны штанг, а влияние поперечной вибрации и фрикционной нагрузки не учитывается.
Форма одномерного волнового уравнения выглядит следующим образом: (4)
Где:
c — скорость передачи звуковой волны в полюсе (задано c = 5000), м / с;
x — расстояние от расчетной площади поперечного сечения в опоре до подвески, м;
u — смещение секции относительно верха, м;
t — время, с;
v — коэффициент демпфирования колонны (s -1 ) (установить v = 1).
Установить граничные условия:
В фиксированной начальной точке u (0, t) = 0.
Конец не закреплен.
В продольном направлении стержня штанги вибрация начинается в конце упругой деформации, в это время: t = 0, поэтому имеется:
Итак, решение проблемы вибрации полюса: (5)
Где:
p i — частота собственных колебаний системы,;
v d — скорость подвеса в конце упругой деформации хода вверх и вниз, мм / с;
ψ — коэффициент распределения статических деформаций;
e — основание натурального логарифма. L — глубина насоса, м.
Таким образом, вибрационная нагрузка на подвеску насосного агрегата может быть получена как (6)
Где:
Е — модуль упругости стали, МПа;
f r — площадь поперечного сечения стержня стержня.
Результаты расчетов моделирования показаны на рис. 9.
Сравнивая и анализируя кривые двух диаграмм индикатора мощности на рис. 9, можно очевидно увидеть, что нагрузка верхнего хода насосного агрегата гидропривода уменьшилась, а нагрузка хода вниз увеличилась.Уменьшена площадь индикаторной диаграммы, то есть снижен расход энергии подвески. По сути, индикаторная диаграмма насосного агрегата с гидроприводом ближе к статической индикаторной диаграмме, что способствует энергосбережению. Диаграммы индикаторов двух симуляций похожи, главным образом потому, что статическая нагрузка (нагрузка на штангу, масляная нагрузка и т. Д.) Подвески насосного агрегата относительно велика (статическая нагрузка при ходе вверх 40,52 кН, статическая нагрузка при ходе вниз 27,52 кН). В условиях малого хода динамическая нагрузка подвески относительно невелика.Тем не менее, все же можно увидеть, что насосный агрегат с гидравлическим приводом по-прежнему имеет лучшее преимущество в снижении динамической нагрузки подвески.
C. Анализ характеристик баланса
Качественный анализ рисунков 2 и 3 может проиллюстрировать, что противовес обычной насосной установки представляет собой баланс подвешенной нагрузки после преобразования кривошипно-шатунного механизма, что является косвенным балансом; Насосная установка с гидравлическим приводом использует принцип рычага для непосредственного балансирования нагрузки на подвеску, что создает прямой баланс.Таким образом, насосный агрегат с гидравлическим приводом имеет хорошее преимущество балансировки в режиме балансировки.
Количественный анализ: нет отчета о методе сравнения чистого крутящего момента традиционной балочной насосной установки и гидравлической насосной установки после балансировки. В этой статье предполагается виртуальный выходной вал редуктора на гидравлической насосной установке. Скорость двух на выходном валу редуктора равна, или, другими словами, скорость двигателя на выходном валу (виртуального) редуктора равна.Игнорируя эффективность трансмиссионного звена, количественный анализ балансных характеристик этих двух компонентов может быть достигнут путем сравнения их чистого крутящего момента на валу.
Для сравнения характеристик баланса этих двух устройств используется традиционный метод расчета среднеквадратичного значения крутящего момента. Чем больше среднеквадратичное значение чистого крутящего момента, тем хуже эффект баланса и выше потребление энергии двигателем.
На основании вышеуказанных параметров насосной установки и параметров состояния скважины для анализа моделирования кривая уравновешенного крутящего момента на редукторе обычной насосной установки в уравновешенном состоянии показана на Рис.
Процесс анализа крутящего момента балансировочной характеристики гидроагрегата на виртуальном выходном валу редуктора выглядит следующим образом:
Чистый крутящий момент на центральном валу балки после балансировки рассчитывается по формуле (7).
(7)Где:
П с — подвешенная нагрузка, кН;
M B — крутящий момент противовеса на центральный вал, кН⋅м.
Что касается процесса вычисления M B , как показано на рисунке 1, угловая скорость луча равна (8)
Таким образом, угол θ 1 составляет θ 1 = π — θ 6 — θ 7 + ω ⋅ 905 = π — θ 1 .На основе синусоидального закона, C 2 = C — C 1 .
В Δ ELF длина L p и θ 3 постоянны, тогда в Δ EFG мы можем получить и θ 2 = — 4 — θ 5 .
Тогда M B (9)
Полученная теоретическая кривая моделирования показана на рисунке 11.
Согласно уравнению (7) и предыдущим предположениям, тогда крутящий момент на выходном валу виртуального редуктора без учета эффективности передачи системы равен (10)
Где V — скорость подвески, м / с; ω — частота вращения выходного вала виртуального редуктора, рад / с.
Кривая чистого крутящего момента, полученная на выходном валу виртуального редуктора, показана на рис. 12.
Используя среднеквадратичное значение чистого крутящего момента для сравнения характеристик кривой крутящего момента на рисунках 10 и 12, метод расчета среднеквадратичного значения представляет собой (11)
Где:
M — значение полезного крутящего момента, кН⋅м;
T — время хода, с.
Таким образом, можно получить среднеквадратичное значение кривой крутящего момента на рисунках 9 и 11, и они составляют 11,7 кН⋅м и 0,835 кН⋅м соответственно. Это падение на 92,9 процента, и преимущество в энергосбережении очевидно, поскольку механизм прямого баланса имеет хорошие характеристики баланса и преимущества энергосбережения.
Результаты и обсуждения
Результаты теоретических исследований показывают, что насосная установка, использующая метод прямой балансировки гидравлического привода, имеет хорошие преимущества в снижении подвешенной нагрузки и чистого крутящего момента двигателя.Для дальнейшей проверки результатов теоретических исследований спроектированный принципиальный прототип был испытан на нефтяном месторождении в сентябре 2020 года, как показано на рис. 13.
Основные данные о состоянии скважины приведены в таблице 3.
Результаты испытаний насосной установки с обычным и гидравлическим приводом приведены в таблице 4.
Результаты испытаний в таблице 4 показывают, что преимущества энергосберегающих насосных агрегатов с гидравлическим приводом очевидны, а показатель экономии активной мощности достиг 30.9%, хотя добыча жидкости немного снизилась. Что еще более важно, нагрузка при ходе вверх уменьшается, а нагрузка при ходе вниз увеличивается. Доказано, что в некоторой степени экспериментальные результаты согласуются с теоретическим анализом. Таким образом, насосный агрегат с гидравлическим приводом имеет преимущество в уменьшении площади индикаторной диаграммы и экономии энергии.
Выводы
В данной статье представлен новый тип насосного агрегата с прямой балансировкой с гидравлическим приводом. Создана модель математического анализа динамики подвески насосной установки.Проведено сравнение хода и индикаторной схемы подвески между штатным насосным агрегатом и новым с гидроприводом. Изучаются качественный анализ и количественный анализ характеристик баланса. Путем инженерных испытаний подтвержден энергосберегающий эффект насосной установки гидропривода. Таким образом, выводы делаются следующим образом:
- Максимальные обороты и ускорение подвески гидронасосного агрегата уменьшены на 21.14% и 28,88% соответственно.
- Нагрузка верхнего хода насосного агрегата с гидравлическим приводом уменьшена, а нагрузка нижнего хода увеличена. Это приводит к уменьшению площади индикаторной диаграммы. В результате индикаторная диаграмма насосного агрегата с гидроприводом приближена к статической индикаторной диаграмме, что способствует энергосбережению.
- Приведена методика количественного анализа балансовых характеристик насосных агрегатов с гидроприводом.Количественный анализ показывает, что среднеквадратичное значение чистого крутящего момента насосного агрегата с гидравлическим приводом уменьшилось на 92,9%. Таким образом, преимущество нового гидронасосного агрегата в энергосбережении очевидно.
- Результаты экспериментов показывают, что насосный агрегат с гидравлическим приводом имеет коэффициент экономии активной энергии до 30,9%.
Список литературы
- 1. Лю Хэ, Хао Чжунсянь, Ван Лянган, Цао Ган. Современное состояние и тенденции развития технологии искусственного подъема.Acta Petrolei Sinica, 2015, 36 (11): 1441–1448.
- 2. Фэн Цзы-Мин, Дин Хуан-Хуань, Цзян Минь-Чжэн. Новый метод вторичной балансировки экономит энергию при работе с насосом со штангой с балансиром кривошипа. SPE: 173889, 2015.
- 3. Сицзюань Чен, Сяоджу Чжан, Бо Ян. Разработка и внедрение шестизвенной и составной уравновешенной насосной установки CYJL3–2.1–6.5F. Технология бурения и добычи, 2005, 28 (3): 74–76.
- 4. Цуй Цзюньго, Сяо Вэньшэн, Фэн Хао.Насосный агрегат с длинным ходом хода, приводимый в движение низкооборотным синхронным двигателем с постоянными магнитами. SPE: 173698, 2014.
- 5. Палка К., Чиж Дж. А. Оптимизация добычи жидкости в скважине с помощью штанговых насосов с переменной скоростью вращения двигателя. SPE Production & Operations, 2009, 24 (2): 346 ~ 352.
- 6. Петерсон Р.Г., Смигура Т., Брюнингс С.А. и др. Производство на PDVSA увеличивается за счет улучшенного контроля SRP. Ежегодная техническая конференция и выставка SPE. Ричардсон: Общество инженеров-нефтяников, 2006.
- 7. Ду Юнцзюнь, Ю Цзяцзи. Разработка системы автоматической регулировки балансировки пучка насосного агрегата. Химическое машиностроение, 2017,44 (01): 52–53.
- 8. Чжао Пэнъю, Чэнь Инлун, Сунь Цзюнь, Чжоу Хуа. Моделирование и моделирование системы испытаний и добычи нефти на основе гидравлического баланса. Журнал Чжэцзянского университета (технические науки), 2016,50 (04): 650–656.
- 9. Сун Вэй, Фэн Цзымин, Чжан Дэши, Ю Нин. Исследования по оптимизационному моделированию и энергосберегающему механизму частотно-регулируемого привода балочного насосного агрегата.Химическое машиностроение, 2020,47 (03): 348–354.
- 10. Ян Хукунь, Чжао Сянжу, Ян Цзинъюань, Чжан Янь, Чэнь Чао. Имитационный анализ следящего баланса бегущей балки насосного агрегата бегущей балки. Энергосберегающие технологии, 2016,34 (02): 134–138.
- 11. Хань Чуаньцзюнь, Гао Тяньдэ, Чжоу Юн. Анализ моделирования маховиковой перекачивающей балки накопителя энергии. Наука и технология хранения энергии, 2020,9 (04): 1186–1192.
- 12. Сяоджу Чжан, Чунью Чжан, Либо Ю.Исследования по энергосбережению системы передачи насосного агрегата. Станки и гидравлические системы, 2020,48 (21): 111–116.
- 13. Вэй Чжан, Леле Пэн. Исследование динамического согласования мощности гидравлического насосного агрегата. Станки и гидравлические системы, 2020,48 (16): 84–89.
- 14. Цицян Хэ, Шу Сяо, Бинь Вэй и др. Выбор гидравлического масла и конструкции системы для гидроагрегатов. Станки и гидравлика, 2017, 45 (8): 137–140.
- 15. Чжан Баоань.Оптимальное проектирование производственной системы механической производственной скважины. China University of Petroleum Press, 2006.
- 16. Гиббс С. Г. Прогнозирование поведения насосных систем со штангой. Журнал нефтяных технологий, 1963, 15 (7): 769 ~ 778.
Что такое центробежный насос
Центробежный насос — это машина, которая использует вращение для передачи жидкости скорости, а затем преобразует эту скорость в поток.
Давайте разберем это определение на компоненты, чтобы мы могли рассматривать каждый по очереди:
- Центробежный насос — это машина.
- Центробежный насос использует вращение для передачи жидкости скорости.
- Центробежный насос преобразует скорость в поток.
Эта статья является частью серии из одиннадцати статей Pumps 101 , разработанной как введение в основы проектирования, выбора и применения центробежных насосов. Чтобы получить максимальную отдачу от Введение в насосы ознакомьтесь с полной серией:
«Центробежный насос — это машина». Каждый центробежный насос включает в себя набор механических компонентов, которые делают возможной работу насоса.Этот механический узел включает вал насоса, установленный на подшипниках, уплотнительный механизм, который предотвращает чрезмерную утечку насоса, конструктивные элементы, предназначенные для выдерживания напряжений и нагрузок, возникающих в насосе во время работы, и поверхности износа, которые позволяют отремонтировать и вернуть насос. к его оригинальным характеристикам.
«Центробежный насос использует вращение для передачи жидкости скорости». Каждый центробежный насос имеет рабочее колесо. Рабочее колесо — это гидравлический компонент, который вращается, сообщая скорость перекачиваемой жидкости.
«Центробежный насос преобразует скорость в поток». Каждый центробежный насос имеет корпус. Корпус представляет собой гидравлический компонент, который улавливает скорость, передаваемую крыльчаткой, и направляет перекачиваемую жидкость к точке нагнетания насоса.
Насос с односторонним всасыванием на раме | Предоставлено Гидравлическим институтом, Парсиппани, штат Нью-Джерси, www.Pumps.orgНа самом базовом уровне центробежный насос состоит только из трех компонентов:
- Рабочее колесо, которое вращается и сообщает жидкости скорость.
- Кожух, который улавливает скорость, создаваемую крыльчаткой, и преобразует эту скорость в стабильный поток.
- Узел механических компонентов, позволяющий вращать рабочее колесо внутри корпуса насоса.
Рабочие колеса центробежного насоса
Рабочее колесо центробежного насоса быстро вращается, чтобы сообщить скорость перекачиваемой жидкости.
Если вы никогда раньше не видели крыльчатку насоса, представьте себе гребной винт лодки.
Когда гребной винт лодки вращается, он сообщает скорость жидкости вокруг него.Когда жидкость движется, эта скорость заставляет гребной винт двигаться вперед в воде.
А теперь представьте, что произошло бы, если бы лодка была закреплена на месте достаточно прочно, чтобы предотвратить движение лодки. Затем представьте, что скорость, создаваемая гребным винтом лодки, сдерживается и контролируется таким образом, что создается поток воды, который вы можете направить туда, куда хотите.
По сути, то, что мы только что описали, является центробежным насосом. Фактически, осевой насос в значительной степени напоминает то, что мы только что описали.
В центробежном насосе у вас есть крыльчатка, которая быстро вращается и сообщает скорость жидкости в насосе, точно так же, как гребной винт лодки сообщает скорость воде в озере. Кожух — это часть устройства, которая принимает эту скорость, содержит ее, управляет ею и отправляет ее в нужном направлении.
Каждое рабочее колесо имеет 1 или несколько лопаток, которые выступают от центра или ступицы рабочего колеса к внешнему диаметру. Когда рабочее колесо вращается, центробежная сила заставляет жидкость быстро перемещаться из центра рабочего колеса вдоль лопастей, а затем выходит из рабочего колеса на самом внешнем диаметре.В результате перекачиваемая жидкость выходит за периметр рабочего колеса с очень высокой скоростью.
Существует много различных типов рабочих колес центробежных насосов. Наиболее распространенные типы рабочих колес насосов обсуждаются в нашей статье «Основные компоненты насоса: улитки, кожухи и рабочие колеса».
Кожухи центробежного насоса
Кожух центробежного насоса — это компонент насоса, который преобразует всю скорость, создаваемую вращающимся рабочим колесом, в управляемый и стабильный поток и направляет его из насоса через точку нагнетания.
Самый распространенный тип оболочки называется спиральной, и он похож на раковину улитки.
Изображение из Краткого введения в центробежные насосы, Джо Эванс, доктор философииРабочее колесо помещено внутри улитки. Однако, как вы, возможно, заметили на изображении выше, рабочее колесо обычно не центрируется в улитке.
Вместо этого рабочее колесо располагается так, чтобы внешний диаметр рабочего колеса был ближе всего к улитке в точке сразу за выпускным отверстием. Точка, в которой рабочее колесо находится ближе всего к спиральной камере, называется водоразделом.
Начиная с водораздела, по мере того, как мы перемещаемся вокруг крыльчатки, расстояние между улиткой и крыльчаткой постепенно увеличивается, пока мы не достигнем точки разгрузки. Это постоянное расширение области вокруг рабочего колеса означает, что давление будет расти от наименьшего зазора к наибольшему, и возрастающее давление будет выталкивать жидкость из точки нагнетания.
Мы только что вкратце затронули тему конструкции корпуса насоса в этой статье. Дополнительную информацию о наиболее распространенных типах корпусов насосов можно найти в нашей статье Основные компоненты насоса: улитки, корпуса и рабочие колеса.
Центробежные насосные агрегаты
Центробежные насосы сами по себе не очень полезны. Чтобы они были полезными, их нужно комбинировать с другим оборудованием. Комбинация оборудования, обеспечивающая работу центробежного насоса, называется насосной установкой.
Центробежная насосная установка включает как минимум два компонента: насос и привод.
В большинстве случаев приводом в центробежной насосной системе является электродвигатель. Однако это не всегда так.Насосы также могут приводиться в действие другими приводами, такими как двигатели, работающие на природном газе, или даже паровые турбины.
Самая распространенная насосная установка объединяет центробежный насос с приводом от электродвигателя.
Моноблочный насос с односторонним всасыванием | Предоставлено Гидравлическим институтом, Парсиппани, штат Нью-Джерси, www.Pumps.orgНа изображении выше показан моноблочный насос с односторонним всасыванием. Это самый простой и распространенный тип центробежных насосных агрегатов. В насосном агрегате этого типа рабочее колесо фактически устанавливается на конце вала двигателя, а корпус насоса устанавливается прямо на лицевую сторону двигателя.В моноблочной насосной установке подшипники двигателя и вал составляют большую часть механической части насоса.
Другой распространенной конструкцией насосов является насос с односторонним всасыванием, установленный на раме. Насос с торцевым всасыванием, установленный на раме, включает в себя полный механический узел и соединен с приводом, оба из которых установлены на общей опорной плите.
Насосы с односторонним всасыванием на раме | Фото: adam.j.rose через Compfight ccЭто далеко не исчерпывающий список возможных конфигураций насосных агрегатов.В статье о распространенных конструкциях насосов мы рассмотрим другие распространенные конфигурации насосных агрегатов. В настоящее время следует учесть, что насосная установка состоит из центробежного насоса и привода, такого как электродвигатель, и может также включать дополнительные компоненты, такие как опорные плиты и муфты, в зависимости от конструкции насоса.
Резюме
Центробежный насос — это машина, которая использует вращение для передачи жидкости скорости, а затем преобразует эту скорость в поток.
Каждый центробежный насос состоит из крыльчатки, корпуса и набора механических компонентов, которые позволяют крыльчатке вращаться внутри корпуса. Рабочее колесо быстро вращается, сообщая жидкости скорость. Скорость преобразуется обсадной колонной в давление и расход.
Центробежные насосы должны быть объединены с приводом в центробежный насосный агрегат, чтобы быть полезными. Центробежные насосные агрегаты различаются по сложности от самых простых и распространенных — насос с односторонним всасыванием, соединенный с электродвигателем, — до сложных, спроектированных по индивидуальному заказу агрегатов стоимостью несколько миллионов долларов, которые состоят из множества отдельных компонентов.